Рассмотрим процесс настройки модулей телеметрии, которые будем подключать к контроллеру APM.
Для чего нужны модули телеметрии (или телеметрия), мы уже разобрались. Теперь, перед использованием, их необходимо настроить. Рассмотрим модули ближе.
Собранные модули выглядят следующим образом:


Один модуль имеет разъем USB для подключения к ПК, второй имеет разъем на контактах PLS или DF-13.
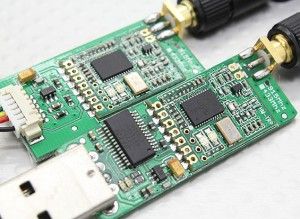
Модуль с USB имеет встроенный на плате адаптер USB-COM на, уже известной нам по предыдущим статьям, микросхеме FT232RL. На модуле с HobbyKing.com обнаружена поддельная микросхема, о чем свидетельствует отказ работы адаптера на свежих драйверах (о подделке впервые информация появилась на habrahabr.ru). В том числе и мне попался такой модуль. Но ничего страшного — надо всего лишь установить драйвер для Windows XP-7 x32 по-старее (версия 2.08.28), который можно скачать тут. Драйвер, который у меня заработал на Windows 8 x64, можно скачать тут. Также ссылка на официальный сайт производителя микросхемы.
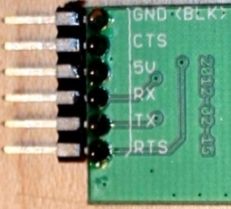
Рассмотрим выводы на модуле, который будем устанавливать на коптер.
Настройка модулей осуществляется двумя способами:
1. Модуль с разъемом USB подключается к ПК, а для второго модуля нам необходим отдельный адаптер USB-COM (можно использовать все тот же, на микросхеме FT232RL, который мы уже использовали для прошивки контроллера). Если у вас нет адаптера (а он должен быть! :-)), то необходимо сначала воспользоваться вторым способом, чтобы не наломать дров (на самом деле ничего страшного, перед изменением каких-либо параметров всегда запоминаем/записываем что было ранее, чтобы была возможность вернуть все назад)!
2. Модуль с разъемом USB подключается к ПК, а на второй модуль подается только питание. Этот способ может быть использован для повторной настройки или, если нам повезло и, модули уже были ранее настроены на совместную работу друг с другом. Чтобы это проверить — необходимо подать питание на оба модуля (один подключаем к USB ПК, а на второй подаем 5В) и, если мы увидели, что на обоих модулях зеленые индикаторы горят, то значит модули уже были настроены на совместную работу. Процесс настройки можно упростить, настраивая оба модуля одновременно.
Опишу весь процесс настройки модулей с нуля.
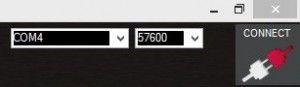
Подключаем наземный модуль (с USB) к ПК, устанавливаем драйвер, смотрим и запоминаем номер COM порта в диспетчере устройств. Далее для настройки можно использовать утилиту 3DR Radio Configuration Utility или Mission Planner. Процесс настройки абсолютно идентичен. Для простоты настройку будем производить через Mission Planner. Запускаем его, выбираем нужный COM порт и скорость 57600 бод. Кнопку «Connect» нажимать не надо!
Переходим на вкладку «Initial Setup — Optional Hardware — 3DR Radio». Далее нажимаем кнопку «Load Settings» и ждем несколько секунд, пока настройки считаются. Если процесс не пошел, то попробуйте выбрать другую скорость и опять нажать кнопку. Если считать параметры так и не удается, то возможно «все плохо» и тогда в модулях необходимо обновить прошивку. Об этом я, возможно, напишу позже, но сейчас почитать о прошивке можно здесь и здесь.
После считывания увидим изображение, подобное этому:

Выставляем/проверяем параметры:
- Format: 25 — формат параметров в прошивке. Менять не надо.
- Baud: 57 — скорость работы порта, означает 57600 бод. Может иметь и другие значения. Для APM по-умолчанию надо 57600.
- Air Speed: 64 — скорость передачи данных по радиоканалу (для большинства случаев лучше всего оставить 64кбит, что является средним значением). Уменьшение этой скорости увеличивает радиус действия, вместе с этим снижение этой скорости уменьшает и общий объем данных которые могут быть переданы по каналу.
- Net ID: 30 — тут ставим что угодно, но лучше изменить от значения по умолчанию. Задает идентификатор сети для совместной работы модулей. Если вы используете несколько комплектов телеметрии для ваших коптеров или полеты часто проходят совместно с друзьями, то на всех парах модулей вы должны установить разные значения.
- Tx Power: 20 — мощность передатчика. 20 — означает 100мВт, максимальное значение.
- ECC: включено — коррекция ошибок. Если вы используете ECC (рекомендуется) объем передаваемых данных по беспроводному каналу данных удваивается. Но это позволит обеспечить более надежную связь на больших расстояниях.
- Mavlink: 1 — включение режима кадрирования пакета.
- Op Resend: включено
- Min Freq: 915000 — минимальная частота (кГц).
- Max Freq: 928000 — максимальная частота (кГц). Лучше оставить как есть. Модули выбирают менее зашумленный канал. Прошивка модемов реализует скачкообразную перестройку частоты (FHSS) с синхронным адаптивным мультиплексированием с временным разделением каналов (TDM). Эти оба параметра можно варьировать, чтобы задать границы частоты вручную. Для обоих парных модулей указывать одинаковые значения.
- # of Channels: 50 — количество используемых каналов.
- Duty Cycle: 100 — процент времени на передачу.
- LBT Rssi: выключено — функция LBR («Listen Before Talk», слушать эфир перед передачей).
- RTS CTS: выключено — Request To Send / Clear To Send, Запрос на отправку/Разрешение отправки.
После того, как указали все значения — нажимаем кнопку «Save Settings» для сохранения измененных параметров в модуле.
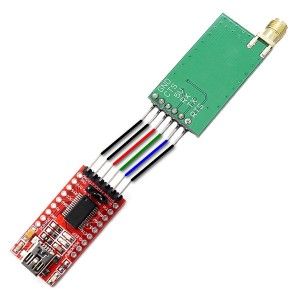
Далее необходимо настроить второй (бортовой) модуль. Производим подключение «один к одному» модуля и адаптера USB-COM (в моем случае FTDI). Самое важное, что необходимо — подать массу и плюс питания и правильно подключить RX и TX.
Производим все те же настройки для бортового модуля, что и для наземного, использую Mission Planner. Выставляем полностью такие же параметры и сохраняем. Еще проверим, чтобы у обоих модулей была одна и та же версия прошивки. Если это не так, то приступаем к обновлению на обоих модулях (см. ссылки выше).
Теперь у нас должна получиться пара настроенных друг на друга модулей телеметрии. Далее необходимо проверить их работу. На модулях имеются индикаторы, которые означают:
- Зеленый индикатор моргает – поиск второго модуля
- Зеленый индикатор горит постоянно – связь со вторым модулем установлена
- Красный индикатор моргает – передача данных
- Красный индикатор горит постоянно – режим обновления прошивки
Подаем питание на оба модуля (один подключаем к USB ПК, а на второй подаем 5В, можно оставить подключение через USB-COM адаптер) и, если мы увидели, что на обоих модулях зеленые индикаторы горят, то значит настройка прошла успешно.
Проверить модули на уровне передачи данных можно, подключившись программой-терминалом (например Hyper Terminal, Putty, SecureCRT) к COM порту (наземного модуля, подключенного к ПК). На бортовом модуле необходимо оставить питание и замкнуть RX и TX (от адаптера соответственно их лучше отсоединить), далее в программе необходимо получить «эхо» (echo), для чего достаточно начать печатать на клавиатуре и в окне терминала будет виден набираемый текст. При размыкании RX и TX соответственно текст набираться не будет.
Теперь, при подключенных обоих модулях, можно проверить работу передачи настроек от одного модуля к другому. Для наземного модуля измените какой-нибудь параметр, например «Net ID», нажмите кнопку «Copy Required Items to Remote», чтобы передать отличающиеся параметры, затем нажать кнопку «Save Settings».

В данной статье мы рассмотрели, как произвести настройку и проверку радио модулей, которые будем использовать для получения данных телеметрии контроллера APM. О подключении далее…
Update 09.09.2014: Важно учесть, что при настройке модулей, нельзя питать плату APM от USB ПК. Подробнее тут. Так же почитайте комментарии Михаила ниже.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.
Данная статья является продолжением статьи «Квадрокоптер на MultiWii SE v2.5 — от задумки до первого полёта», в ней я поделюсь с Вами своим опытом установки и настройки FPV оборудования на квадрокоптер для полётов от первого лица. Заинтересовавшихся прошу под кат.


Используемые комплектующие:
1. Приёмник/передатчик Boscam 5.8Ghz 200mW 8 Channel FPV Audio Video Transmitter & Receiver TS351+RC805 2Km
2. Телеметрия CRIUS MAVLink-OSD v2.2
3. CRIUS NEO-6 GPS v3.0 + I2C-GPS NAV Module v1.1
4. FPV монитор (использовал старый телевизор)
5. FPV камера (использовал уличную камеру видеонаблюдения)
Передатчик TS351, телеметрию MAVLink-OSD и камеру подключаем к MultiWii SE v2.5 по схеме ниже:


Модуль GPS NEO-6 подключаем к модулю I2C-GPS в разъём «GPS», а модуль I2C-GPS через разъём «FC» подключаем к MultiWii в разъём «I2C».




Проверка модуля GPS NEO-6 на работоспособность: подключаем модуль через программатор FTDI (GND к GND, RX к TX, TX к RX, +5V к VCC) к PC; запускаем на PC установленную программу «u-center» (ссылка на прогу в конце статьи); выбираем автоматическую скорость передачи данных -> нажимаем «Autobauding» (цифра «1»); выбираем COM порт, к которому подключен модуль GPS NEO-6 (цифра «2»); ждём…, если всё сделали правильно, через некоторое время начнут поступать данные от модуля GPS NEO-6 (цифра «3»), у меня уже через 3-4 мин. пошли данные.

Прошивка телеметрии MAVLink-OSD: подключаем модуль через программатор FTDI (GND к GND, RX к TX, TX к RX, +5V к VCC) к PC; запускаем на PC программу «Arduino IDE»; открываем прошивку «KV_Team_OSD_2.3» (ссылка на прошивку в конце статьи) — запускать нужно файл KV_Team_OSD_2.3/KV_Team_OSD/KV_Team_OSD.ino; прошиваем… Далее нужно прошить шрифты; запускаем KV_Team_OSD_2.3/KV_Team_GUI; выбираем COM порт, к которому подключен модуль MAVLink-OSD; в блоке «FONT TOOLS» нажимаем «BROWSE», выбираем шрифт «KVTOSD_FMap_v1_Small.mcm», нажимаем «Upload» и ждём пока шрифты загрузятся, в процессе будет мигать индикатор «TX» в блоке «PORT STATUS»; Теперь в блоке «OSD Controls» нажимаем «READ» (прочитать данные с платы), вносим необходимые настройки для отображения нужной Вам информации на мониторе, нажимаем «WRITE» (записать на плату). P.S. — небольшое отступление, я перепробовал не один десяток прошивок для MAVLink-OSD, но во всех шрифты никак не хотели прошиваться, то ли это особенность этой платы, то ли помогло то, что прошивая шрифты из прошивки «KV_Team_OSD_2.3» я подал питание от аккума (12V) на «аналоговую часть» платы, а «цифровая часть» платы соответственно питается от 5V!


Подключаем приёмник RC805 к монитору и при желании крепим это всё на аппу. Помните, что для корректного видео сигнала, каналы на приёмнике/передатчике должны быть идентичны!


Ссылки для скачивания:
Программа u-center
Прошивка KV_Team_OSD_2.3
P.S. — статья была подготовлена более 2-х лет назад и благополучно забыта в черновике, возможно уже и не актуальна, но всё же решил опубликовать, строго не судите…

The 3DR RadioTelemetry Kit-915 Mhz works fine on my Windows 7 laptop.
But out in the field I like to use an older Windows XP laptop.
I installed the Mission Planer APM, seems to work fine.
The only problem, the plug and play for the 3DR RadioTelemetry Kit-915 Mhz doesn’t work.
So I need to download a driver.
Please has someone an idea where I could find and download the right driver ???
Thanks a lot.
Loading …
![]()
RT @chr1sa: Donkeycar 4.4 released with tons of new features, including path learning (useful with GPS outdoors), better Web and Lidar supp…
![]()
RT @NXP: We are already biting our nails in anticipation of the #NXPCupEMEA challenge! 😉 Did you know there are great cash prizes to be won…
![]()
RT @gclue_akira: レースまであと3日。今回のコースは激ムズかも。あと一歩
#jetracer https://t.co/GKcEjImQ3t
![]()
![]()
RT @chr1sa: The next @DIYRobocars autonomous car race at @circuitlaunch will be on Sat, Dec 10.
Thrills, spills and a Brazilian BBQ. Fun…
![]()
RT @arthiak_tc: Donkey car platform … Still training uses behavioral cloning #TCXpo #diyrobocar @OttawaAVGroup https://t.co/PHBYwlFlnE
![]()
RT @emurmur77: Points for style. @donkeycar racing in @diyrobocars at @UCSDJacobs thanks @chr1sa for taking the video. https://t.co/Y2hMyj1…
![]()
RT @SmallpixelCar: Going to @diyrobocars race at @UCSDJacobs https://t.co/Rrf9vDJ8TJ
![]()
RT @SmallpixelCar: Race @diyrobocars at @UCSDJacobs thanks @chr1sa for taking the video. https://t.co/kK686Hb9Ej
![]()
RT @PiWarsRobotics: Presenting: the Hacky Racers Robotic Racing Series in collaboration with #PiWars. Find out more and register your inter…
![]()
RT @Hacky_Racers: There will be three classes at this event: A4, A2, and Hacky Racer! A4 and A2 are based around UK paper sizing and existi…
![]()
![]()
![]()
![]()
RT @NeaveEng: Calling all UK based folks interested in @diyrobocars, @f1tenth, @donkey_car, and similar robot racing competitions! @hacky_r…
![]()
RT @araffin2: 🏎️
After hours of video editing, I’m happy to share a best of my Twitch videos on learning to race with RL.
🏎️
Each part is…
More…
Loading …
Телеметрия не конектится.
|
#1 — 26 августа 2018, воскресенье |
|
|
Посетитель
Сообщений: 3 Москва 1618 дней назад |
0 Помогите пожалуйста разобраться в чем проблема! |
|
#2 — 26 августа 2018, воскресенье |
|
|
Модератор Сообщений: 2588 Москва 11 часов назад |
0 Зеленый светодиод мигает — поиск сопряженного радиомодуля Вариант решения проблемы: |
|
#3 — 26 августа 2018, воскресенье |
|
|
Посетитель
Сообщений: 3 Москва 1618 дней назад |
0 А как узнать какой тип платы? |
|
#4 — 27 августа 2018, понедельник |
|
|
Модератор Сообщений: 2588 Москва 11 часов назад |
0 Тут надо смотреть на базе чего сделана телеметрия. Или методом тыка. |
|
#5 — 27 августа 2018, понедельник |
|
|
Посетитель
Сообщений: 3 Москва 1618 дней назад |
0 Я попробовал методом тыка все платы ни одна не подходит, после загрузки постоянно выдает ошибки. Но у одной платы Arduino Gemma ошибки начинаются еще при компиляции. Не могу понять в чем причина. |
|
#6 — 23 июля 2019, вторник |
|
|
Посетитель
Сообщений: 1 Москва 1292 дня назад |
0 konst, Здравствуйте я купил телеметрию подключил её к квадрокоптеру и на модули air начили мигать два светодиода (зелёный, красный ) я перепрошил два модуля и они всё Ровно не неконеклились друг с другом и светодиоды мигали. Подскажите пожалуйста что мне делать |
|
#7 — 24 июля 2019, среда |
|
|
Модератор Сообщений: 2588 Москва 11 часов назад |
0 Я бы вдумчиво почитал мануалы и сделал перепрошивку заново. Если модули не коннектятся, значит что то сделано не так. |
|
#8 — 2 августа 2019, пятница |
|
|
Посетитель
Сообщений: 1 Светлогорск 1266 дней назад |
0 Ferdinand100400, Ferdinand100400: Скорее всего телеметрия постоянно находится в режиме загрузки прошивки. Как это исправить? Та же проблема, но с наземным модулем.Если найдено решение, то сообщите пожалуйста какое |
|
#9 — 2 августа 2020, воскресенье |
|
|
Посетитель
Сообщений: 2 916 дней назад |
0 день добрый! |
|
#10 — 2 августа 2020, воскресенье |
|
|
Посетитель
Сообщений: 2 916 дней назад |
0 Помогите, почему так происходит, при разных подключениях. |
|
#11 — 11 февраля 2021, четверг |
|
|
Посетитель
Сообщений: 1 Таганрог 708 дней назад |
0 Привет. Кто небудь подскажет в чем проблема?! Крякнулся бортовой модуль телеметрии. Купил новую. Перепрошил. Полетник PIX. Через кабель связь с QGC есть. А через телеметрию нет. Хотя индикаторы на обоих модулях горят зеленным постоянно. |

У вас нет прав, чтобы писать на форуме.
Случайные статьи
Обзор RunCam 3

konst
0
10161
Обзор экщен камеры. Плюсы и минусы, доработки.
Настройка фокуса Xiaomi Yi

COPterMan
3
16232
Как настроить фокус Xiaomi Yi. Как улучшить запись с микрофона. Как убрать саморазряд аккумулятора.
Avatar Scorpion своими руками

КвадроЛетчик
0
3168
Изготовление радиоуправляемого бикоптера из фильма Аватар, ссылки на чертежи для 3D принтера и электронику для этого дрона.
Выбор регулятора и аккумулятора

konst
1
28072
Так как неоднократно на форуме возникают вопросы типа: а можно поставить регулятор на 20А на мотор 12А, то решил написать статью.
Рекомендации и купоны
 |
FlySky FS i6 — это самый дешевый полноценный пульт для дрона! Смотреть обзор: FlySky FS i6 Заказать пульт можно здесь. |
|
FlySky FS i6 — это самый дешевый полноценный пульт для дрона! Смотреть обзор: FlySky FS i6 Заказать пульт можно здесь. |
 |
Makerfire Armor 85 HD V2 — небольшой квадрокоптер с FPV камерой которая пишет в HD на борту дрона. Смотреть обзор: Makerfire Armor 85 HD V2 Заказать можно здесь. |
|
Makerfire Armor 85 HD V2 — небольшой квадрокоптер с FPV камерой которая пишет в HD на борту дрона. Смотреть обзор: Makerfire Armor 85 HD V2 Заказать можно здесь. |
 |
Самая удачная камера для Drone Racing Смотреть обзор: Обзор RunCam v2 Заказать RunCam V2: тут |
|
Самая удачная камера для Drone Racing Смотреть обзор: Обзор RunCam v2 Заказать RunCam V2: тут |
 |
Самый дешевый, неубивемый квадрокоптер. |
|
Самый дешевый, неубивемый квадрокоптер. |
Новые видео о дронах — ежедневные обновления!
Новости форума
|
сегодня в 14:36 |
|
Huchting отвечает в теме «Не биндится Eachine UZ 65 с Jumper T-Lite» на форуме «Комнатные квадрокоптеры» |
|
konst: Полная самоделка, это, конечно, крайний вариант, но он показывает смысл того, что можно сделать дрон из чего угодно. Заменить транзистор у меня нет возможности, но вот вопрос — можно… |
||
|
22 января 2023 |
|
konst отвечает в теме «Помогите пожалуйста с OSD» на форуме «Системы FPV и запись видео» |
|
Стоит покапаться с настройками полетника. Включенно ли OSD и тд. Я таким полетником дела не имел, так что не могу более точно посоветовать. |
||
|
21 января 2023 |
|
FruitCake отвечает в теме «Помогите пожалeйста разобраться новичку с DJI O3» на форуме «Самодельные проекты» |
|
O3 Air Unit имеет ту же распиновку, что и предыдущие Air Unit и Vista, он подключается к полетным контроллерам с 6-контактным разъемом DJI. Он может питаться от напряжения от 2S до 6S (7,4-26,4… |
||
|
17 января 2023 |
|
konst отвечает в теме «Управление сервоприводом на MambaF405» на форуме «Самодельные проекты» |
|
Я обычно просто покупаю другой менее проблемный полетник. Смотрю вариант компоновки который не требует пляски с бубном при настройке и беру такую, уже не раз протестированную другими… |
||
|
15 января 2023 |
|
Valery1900 отвечает в теме «[РЕШЕНО] Полетный контроллер MATEK F405-TE» на форуме «Самодельные проекты» |
|
Спасибо за быстрый ответ (сарказм)… |
||
|
19 ноября 2022 |
|
konst отвечает в теме «Вопрос спецам!» на форуме «Системы FPV и запись видео» |
|
FruitCake , да, можно напрямую. |
||
|
15 ноября 2022 |
|
konst отвечает в теме «Минимальный дрон для обучения» на форуме «Покупные квадрокоптеры» |
|
Вот пара вариантов: http://qrali.com/x11 — мелкий для полетов в доме http://qrali.com/x12 — по больше для полетов в доме и на улице |
|
All, I have a 3DR Radio Telemetry set and I’m have an issue with loading the driver on my laptop with Windows 7. It works just fine when attempting to install it on my desktop. When I plug in the ground station to the laptop, I see an entry for «USB Serial Port» under the Ports section along with a yellow «!». The properties screen list the following; «Reinstall the drivers for this deivce. (Code 18) To reinstall the drivers for this device, click reinstall driver. I’ve tried this multiple times. According to everything I’ve read, Windows 7 should search the update site and grab the correct driver. I’ve even tried downloading the driver from the FTDIChip.com site and loading that one. Does any one think it has something to do with the host controller on the laptop? I loaded the latest drivers from Dell and that didn’t help. By the way, I’m using an 3DR APM 2.5 that communicates fine to the laptop. I’m not sure if that matters. Does anyone have any ideas or possibly seen an issue similar? |
|
|
Sign up now to remove ads between posts |
|
|
did you actually rt mouse and uninstall the driver in device manager, not an update, then plug unit back in and let windows fresh install it again. |
|
I’ve tried both uninstall and reinstall with the same result. I’ve also tried 3 different usb ports on my laptop. |
|
|
So, I ended up getting it working. I thought I would document what I did in case it might be useful for someone else. 1. Right clicked on the faulted comm port and choose «Update Driver Software». 2. Clicked «Browser my computer for driver software». 3. Clicked «Let me pick from a list…..» 4. Clicked «Have Disk» button. 5. Navigated to the driver directory that I downloaded from FTDIChip.com. 6. Picked the file «FTDIport.inf». 7. It started to work. |
|
|
Thank you so much! Yes, I did need your help, thanks for taking the time to update your thread. I had the exact same problem and the 3DR website is so messy to navigate. I owe you a cold one. |
|
|
Hi i had the same problem but all the guides on the net didnot work for me |
|
|
|
Quote:
Originally Posted by ryoma Hi i had the same problem but all the guides on the net didnot work for me That is exactly how the device should be detected. The deal is, all Windows HW Detection «sees» is the CP2102 USB to Serial (UART/ Universal Asynchronous Receiver/Transmitter) port bridge device. Windows HW knows NOTHING ABOUT the radio. |
|
|
Ryoma…. PERFECT!!!! |
|
|
Quote:
Originally Posted by ryoma Hi i had the same problem but all the guides on the net didnot work for me I also have this 3DR clone on a Win7 laptop and this driver is the right one to use. Works Perfectly on an APM 2.8 FC. Use the windows device manager to find the CP2102… device’s com port # and then set the Baud rate to 56K and click connect in Mission Planner and voila you are connected. Thanks for the Link to that device driver. |

|
Hi, I have a strange behavior. I have a CX20. Already have the custom firmware and performed the APM cable change. My PC has the win8.1 and have installed the CP210x USB to UART Bridge VCP Drivers. This was the link Then if download the Tower for my Android phone and tablet it works perfectly withno issues. What I notice was that if I connect to my tablet/phone before opening the tower the two devices automatically pair. It looks like that if gets power will automatically search for pairing. Thanks for the support in advance |
|
|
Hi, Its the V1 (no micro USB) The strange thing is why I can connect with success with android and wiht windows I have teh issue that teh Ground module cannot communicate with the Air module. Do I need to install the CP210x USB to UART Bridge VCP Drivers and the FTDIChip.com driver also. My big doubt regarding this modules is when that they should pair to each other? Thanks in advance |
|
|
Hi, The telemetry kit is this in the link |
|
|
HI, Found the issue when connected to the PC. It seems that the PC was to far a way (+- 2 meters) from the CX20. Thus the Ground and Air were not able to pair. This 3DR kit is with 100mw but comes limited. So from this experience it cannot go more than 1 meter. Since this was solved, now comes my second question for help. Thanks for the help |
|
Использование радиомодулей для телеметрических данных с полетного контроллера

Радиомодули являются идеальным способом для настроки телеметрии между APM / Pixhawk и наземной станцией. Сам модуль
небольшой, недорогой и с большим диапазоном радиодействия используемый открытую прошивку с открытым исходным кодом,
которая позволяет нам делать то, что не может быть сделано с другими радиомодулями. Инструкция на этой странице
описывает работу с новой версией модуля ver2 и более ранней версии ver1.
Особенности модуля:
- очень малый размер
- легкий вес (до 4 грамм без антенны)
- работа в диапазонах 915MHz или 433MHz
- чувствительность приемника -121 дБм
- передавать мощность до 20 дБм (100 мВт)
- прозрачный последовательный канал
- скорость передачи данных до 250kbps
- Протокол MAVLink и отчетов о состоянии
- Поддержка частотного прыжка (FHSS)
- адаптивное мультиплексирование с временным разделением (TDM)
- поддержка LBT и AFA
- настраиваемый рабочий цикл
- встроенный код коррекции ошибок (можно исправить до 25% битовых ошибок данных)
- модуль продемонстрировал дальность от нескольких километров с небольшой всенаправленной антенной
- можно использовать двунаправленный уселитель для еще большего радиуса действия
- прошивки с открытым исходным кодом
- AT команд для конфигурации радио
- RT команды для удаленного конфигурирования радио
- адаптивное управление потоком при использовании APM
- базируется на основе радиомодулей HM-TRP, с Si1000 8051 микроконтроллера и радиомодуля Si4432 , RF23
Подключение радиомодулей
Вам потребуются два модуля , один для вашего квадокоптера, самолета, машинки , а другой для наземной станции. При использовании модулей
первой версии у модуля «земля» есть USB разъем, что позволяет легко его подключить непосредственно к наземной станции
В ОС Windows 7 и выше установка драйвера радиомодуля будет произведенена автоматически при первом подключении (при наличии интернета),
но если это не будет происходить по некоторым причинам или же вы используете старую ОС Windows XP (или старее) вы можете получить
драйвера по этой ссылке
У мервой версии, которая подключается к полетному конроллеру есть контактный разъем, который может быть подключен на прямую
к телеметрическому порту APM / Pixhawk / PX4, как показано ниже
Примечание: Вы не можете подключиться к APM2.x, если он так же подключен через USB (они имеют один и тот же порт)
поэтому убедитесь, что вы отключили кабель USB от полетного контроллера квадрокоптера , прежде чем устанавливать беспроводное соединение через ПО

Используйте прилагаемый кабель и подключите его к порту телеметрии APM , а другой стороной к радиомодулю

Подключение модуля в APM2 (устарел) , как показано ниже:


Модули поставляются с предварительно настроенными параметрами соединения порта в значении 57600 бит/с,
которая являеся скоростью по умолчанию, которая использует APM для телеметрии, но вы можете изменить это на любое другое значение,
которое вам нравиться, либо с помощью AT команд Mission Planner или специальной программе конфигурации
Подключение к Pixhawk
Порт полетного контроллера Pixhawk использует 6-штырьковый DF13 разъем, вместо 5-штырькового используемого на APM2.
Это позволяет управлять потоком, но это означает, что необходимо будет переделать кабеля, что бы подключить
модули первой версии к Pixhawk. Соедените, как показано ниже:

Подключение к PX4

Использование радиомодулей с вашим PX4FMU плюс PX4IO полетным контроллером
Радиомодули второй версии
Вторая версия радиомодулей имеет порт микро-USB и 6-ти портовый DF13. Инструкция по конфигурации
на этой странице относиться к обеим версиям радио


Конфигурация и использование радиомодулей
Значения светодиодов
В радиомодулях есть два светодиода, один красный и один зеленый. Значение состояния горения светодиодов заключается в следующем:
- Зеленый светодиод мигает — поиск сопряженного радиомодуля
- Зеленый светодиод постоянно горит — связь установлена с другим модулем радио
- Красный светодиод мигает — передачи данных
- красный светодиод постоянно горит — модуль находиться в режиме обновления прошивки
Настройка с помощью ПО Mission Planner
В последних версиях Mission Planner в разделе 3DR Radio с помощью простого интерфейса GUI можно произвести настройку.
Выберите нужный порт, который использует модуль «земля» и подключитесь на скорости передачи данных 57к.
Затем нажмите клавиши CTRL-A и откроется окно. Нажмите на кнопку «Загрузить настройки» и эти параметры считаются с
модемов и отобразятся в окне. (обратите внимание, что второй модуль тоже должен быть подключен т.к. это позволит в случае смены канала применить
настройки и на удаленном).

Использование кабеля FTDI-USB для настройки радиомодулей
Если предыдущие пункты не работают, попробуйте следующее
Подключите все, Настройка радиомодуля «земля»
- Подключите радиомодуль «воздух» кабелем FTDI-к-USB к компьютеру в USB порт и обратите внимание на номер COM-порта
- Используйте Windows> Диспетчер устройств> Порты для выявления номера COM порта
- Вы будете знать, что кабель FTDI правильно ориентирован на радиомодуле «воздух» когда мигает зеленый светодиод.
- Подключите радиомодуль «земля» к порту USB на вашем компьютере и обратите внимание на номер COM-порта, В закладке Mission Planner
в правом верхнем углу, установить скорость 57600 и выберите номер COM порта модуля «земля» - В Mission Planner Flight, нажмите Ctrl-A, чтобы открыть окно настройки радио, нажмите Настройки нагрузка (с модуля «земля»)
- В разделе Mission Planner — конфигурация радио, установите флажок «Дополнительные параметры»
- Если загруженные значения не те же самые, что и выше рекомендуемых настроек, сделайте их так, чтобы были и нажмите Сохранить
Настройка радиомодуля «воздух»
- В Mission Planner в правом верхнем углу, выберите COM-порт радиомодуля
- В МП окне конфигурации радио, нажмите на Загрузить настройки (от радиомодуля «воздух»)
- Редактируйте настройки радиомодуля «воздух» (в том числе Advanced Options),
чтобы они были точно такие же, как и у радиомодуля «земля», а затем сохраните настройки нажав клавижу «Save Setting» (для радиомодуля «воздух») - Вы не можете быть в состоянии добавить значение в поле Формат, это нормально
- В Mission Planner нажмите «Настроить» -> 3DR Радио -> и введите те же самые параметры,
включая продвинутые и нажмите Save Settings.
Подождите, когда оба радиомодуля соединятся (постоянное свечение зеленого светодиода)
Если возникла проблема и этого не произошло — обновите микропрограмму (прошивку у каждого модуля)
Нажмите на «обновление прошивки» при подключении к каждому радиомодулю в свою очередь, затем повторите вышеописанное.
Имейте в виду, что в то время , как вы физически подключены к радиомодулю с помощью COM-порта,
вы не можете использовать кнопку «копировать настройки на удаленное устройство» (нет удаленного соединения со вторым устройством)
Проверка беспроводной телеметрии
- Отключите FTDI-to-USB от APM
- Подключите радиомодуль «воздух» к APM и подайте питаниче через батарейку
- В Mission Planner -> Flight Data -> укажите Com-порт наземного радиомодуля , указав скорость и нажмите Connect
Скорости подключения телеметрии по воздуху и кабелем
В списке параметров есть параметры SERIAL_SPEED и AIR_SPEED , которые находятся в той же форме,
что полетный контроллер Ardupilot использует для параметра SERIAL3_SPEED EEPROM.
Эта скорость в «kbps» (килобит) в виде целого числа, так цифра «9» означает 9600 бод,
«38» означает 38400, «115» — 115200 и т.д.
Выбор скорости передачи данных по воздуху
Ключевым параметром, который управляет спектр вашего радиоприемника является AIR_SPEED.
По умолчанию равен 64 (который является 64кbps) даст вам соединение порядка километра
с обычными аненнами типа «сосиська», которые ставятся на домашних роутерах. Понижение этого параметра
может помочь увеличить дальность, но это так же снижает передаваемое их количество.
Микропрограмма радиомодуля может поддерживать только 13 типов скоростей обмена данных телеметрии по воздуху,
которые: 2, 4, 8, 16, 19, 24, 32, 48, 64, 96, 128, 192 и 250.
Используя нестандартные скорости можно, но это уже выходит за рамки этого описания и в большинстве случаев нужна
под специфичные проекты.
Какую скорость выбрать — будет зависить от следующих факторов:
- Какая дальность вам нужна
- С какой частотой вы будете отправлять данные
- Необходимо ли вам отправка в одну сторону или в обе
- Включена ли у вас коррекция ошибок — ECC
- Есть ли у вас прошивка Ardupilot с адаптивным управлением потока скорости
Для большинства приложений телеметрии вы в первую очередь будете посылать данные в освноном в одном направлении:
от квадрокоптера (или самолета) к наземной станции. Для большинства людей объем данных передаваемых с наземной станции
на борт квадрокоптера (или самолета) мала, это может быть обычный пакет управления плюс пакет «серцебеения»
Если вы используете джостик для управление вашим квадрокоптером или самолетом, то вы будете отправлять намного больше
данных с наземной станции на борт и в этом случае вы можете увеличить значение AIR_SPEED , хотя дальность будет снижена.
Параметр ECC делает большую разницу в скорости передачи данных, которую можно поддерживать на заданном AIR_SPEED.
Если ECC установить в ноль, то не будет отправлться коррекция ошибок, а радиомодуль будет использовать простой
16 битный CRC алгоритм для обнаружения ошибок передачи. В этом случае ваш радио будет в состоянии
подерживать передачу данных в одном направлении , около 90% от AIR_SPEED.
Если включить ECC (который очень рекомендуется), то скорость передачи данных может уменьшиться вдвое.
Система ECC удваивает размер данных, передаваемых по радио. Частота передаваемых ошибок резко упадет и вы сможете
получать намного более надежную информацию на больших растояниях.
Если у вас установлена последняя прошивка Ardupilot (APM Plane 2.33 и выше, APM Copter 2.54 и выше), то
полетный контроллер автоматически адаптирует свои скорости телеметрии к тому, что бы радиомодули могли работать используя
MAVLink Radio пакеты передавая потоки MAVLink данных. Это позволяет «поддерживать подписку» путем создания больше
скорости SERIAL_SPEED, чем может справляться по радио.
Другим фактором в выборе скорости передачи данных является TDM ‘sync time’. Два радиомодуля должны работать по шаблону скачкообразной частоты.
Они делают это путем медленного изменения принимающего канала в то время, как быстро меняется канал передачи. Этот
процесс получения синхронно с другой радио занимает всего несколько секунд, при высоких скоростях передачи данных, но становиться
медленнее при низких скоростях передачи данных.
Для большинства приложений любительских квадрокоптеров AIR_SPEED по умолчанию 64 и ECC включен.
Исправление ошибок
Как уже упоминалось выше, радиомодули поддерживают коррекцию ошибок 12/24 Golay, если вы установите параметр
ECC до 1, что означает , что на каждые 12 бит данных по радио уйдет 24 бита, вычисляя биты используя таблицу Голея.
Обратный процесс происходит на принимающем радиомодуле, что позволяет на каждые принимаемые 12 бит до 3 бит проверки отправить (т.е. 25% провероных данных на ошибки)
Недостатком опции ECC является то, что это вдвое влияет на пропускную способность данных, но в большинстве случаев
это этого стоит. Вы способны поддерживать надежную связь в течении длительных интервалах. Вы так же получите меньше
«шума» в последовательном потоке
MAVLink поток
Если вы установите опцию MAVLINK к значению 1 или 2, то радиомодули будут вещать MAVLink кадры.
Протокол MAVlink используется для передачи Ardupilot данные телеметрии к наземной станции.
При использовании кадров MAVLink радиомодули будут пытаться выровнять границы MAVLink пауктов.
Это означает, что если пакет будет потерян или передана его часть он не будет рассматриваться приемником.
Частичный пакет будет выглядеть как помехи на линии в консоли наземной станции.
Если вы установите значение MAVLink до 2 , то в дополнение к выполнению MAVLink обрамления радио будет искать
RC_OVERRIDE пакеты (используется для джостиков) и будет убеждаться, что эти пакеты будут посланы как можно быстрее. Эта
позиция полезна, если вы используете основаную на джостике контроль полета.
Прошивка радиомодулей будет стараться уместить несколько пакетов MAVLink в один радиопакет, для достяжении максимальной
эффективности. Наибольший размер радиопакета 252 байт.
Прошивка радиомодулей поддерживает как MAVLink 0.9, так и MAVLink 1.0 форматы передачи данных.
MAVLink отчетность
Если параметр MAVLINK установлен в 1, то прошивка радиомодулей так же будет искать сообщение MAVLink HEARTBEAT
по связи. Если он видет сообщение HEARTBEAT то знает, что протокол MAVLink находится в использовании
и начнется забор вставляемых пакетов состояния в последовательном потоке данных.
Радиопакеты содержат информацию о RSSI (показатель интенсивности принятого сигнала) уровня
на обоих линий связи, что позволяет наземной станции или квадрокоптеру принять меры в случае , если
качество связи падает слишком низко.
Радиопакеты так же содержат инфомацию о проценте ошибок и как полон последовательный буфер передачи (в процентах).
Последняя прошивка Ardupilot может использовать эту информацию для автоматической адаптации скорости
телеметрического потока в скорость передачи данных, что радио может передавать.
Уровни мощности
Вы должны быть очень осторожны настраивая радиомодули, что бы оставаться в рамках правовых ограничений мощности в стране,
где вы используете все это. Уровень мощности по-умолчанию 20dBm отлично подходит для США и Австралии,
а до 30dBm допускается лицензией класса LIPD. В полосе частот 915-928MHz для скачкообразной перестройки частоты.
Так что пока ваши антены имеют коэффициент усиления меньше 10dBi вы должны быть в рамках правил ISM. Ну а что касается
России — старайтесь тоже сильно не «шуметь».
Радиомодули не могут поддерживать произвольные уровни мощности, зато есть следующая таблица поддерживаемых уровней мощности
Мощность (дБм) Мощность (мВт)
1 1.3
2 1.6
5 3.2
8 6.3
11 12.5
14 25
17 50
20 100
Если вы выберите неподдерживаемый уровень мощности радиомодуль выберет следующий высокий уровень питания от
приведеной выше таблицы.
Пожалуйста, тщательно проверяйте EIRP (эквивалентная изотропному излучаемая мощность) пределы мощности для вашей страны,
убедитесь, что вы учитываете коэффициент усиления антенны.
Например , если ваши местные законы позволяют в течении времени максимум 30dBm (1W) EIRP , то если вы используете
усилитель с коэффициентом усиления передающей 12dB и антенны с 3dBi усилением, то вам нужно будет установить TxPower максимум до 14.
Если вы не знаете, как вычислить его, мы сделали учебник для вас здесь:
Понимание ДБ, Вт и ДБМ
Использование AT команд
Радиомодемы поддерживают вариант AT команд модема Hayes для конфигурациии.
Если открыть порт радиомодема в терминале, вы можете ввести радио в АТ режим введя последовательность «+++».
При входе в АТ режим вы получите ответ «ОК» от радиомодуля и он перестанет отображать данные , передаваемые
из другого радиомодуля.
В командном режиме АТ вы можете дать команду управления АТ локальному радиомодему или (если успешно подключены)
вы можете использовать команды «RT» что бы управлять удаленным радио.
Доступные команды AT:
- ATI — показать версию радиомодуля
- ATI2 — показать тип платы
- ATI3 — показать частоту платы
- ATI4 — показать версию платы
- ATI5 — показать все устанавливаемое пользователем параметры из EEPROM
- ATI6 — Отображение отчета времени TDM
- ATI7 — Отображение отчета сигнал RSSI
- ATO — Выйти из командного режима
- ATSn? — Номер параметра радиомодуля n-номера
- ATSn = X — установить параметр номер ‘n’ в значение ‘X’
- АТЗ — перезагрузить радио
- AT&W — записать текущие параметры в EEPROM
- AT&F — сброс всех параметров на заводские значения
- AT&T = RSSI — включить отчетность RSSI
- AT & T = TDM — включить отчетность TDM
- AT&T — отключить отчетности
все эти команды, исключая ATO, могут быть использованны на подключенном удаленном радиомодуле, заменив «AT» на «RT»
Возможно самой полезной командой является «ATTI5» которая отображает все пользовательские параметры установленные в EEPROM.
Они будут выводиться таким отчетом:
S0: FORMAT = 22 S1: SERIAL_SPEED = 57 S2: AIR_SPEED = 64 S3: NETID = 25 S4: TxPower = 20 S5: ECC = 1 S6: MAVLINK = 1 S7: OPPRESEND = 1 S8: MIN_FREQ = 915000 S9: MAX_FREQ = 928000 S10: NUM_CHANNELS = 50 S11: DUTY_CYCLE = 100 S12: LBT_RSSI = 0 S13: MANCHESTER = 0 S14: RTSCTS = 0 S15: MAX_WINDOW = 131
Первая колонка S — это регистер для установки, если вы желатете поменять параметр. Для примера
что бы установить мощность передачи к 10dBm используйте «ATS4=10»
Большинство параметров вступают в силу только при следующей перезагрузки. Так обычная картина для установки параметров,
которые вы хотите, а затем используя команду AT&W что бы записать параметры в EEPROM, затем
используем выполняем перезагрузку с помощью ATZ. Исключением является мощность передачи,
которая меняется сразу (хотя она вернется к старой при перезагрузке, если не используете AT&W)
Смысл параметров выглядит следующим образом:
- FORMAT — это для формата EEPROM версии. Не меняйте его
- SERIAL_SPEED — это скорость в «форме одного байт» (см ниже)
- AIR_SPEED — это скорость передачи данных по воздуху в «форме одного байта»
- NETID — это идентификатор сети. Он должен быть одинаковым для обоих ваших радиоприемников
- TxPower — это мощность передачи в дБм. Максимально 20dBm
- ECC — это включает / выключает корректировки ошибок Golay кода с исправлением
- MAVLINK — это управляет MAVLink кадрирование и отчетности. 0 = нет mavlink потока, 1 = mavlink кадр, 2 = низкий задержки mavlink кадр
- MIN_FREQ — минимальная частота в кГц
- MAX_FREQ — максимальная частота в кГц
- NUM_CHANNELS — количество каналов для перестройки частоты (скачкообразной частоты)
- DUTY_CYCLE — процент времени, чтобы позволить передачу данных
- LBT_RSSI — Слушай Перед порогом Talk (см документацию ниже)
- MAX_WINDOW — макс окно передачи в мсек, 131 по умолчанию, 33 рекомендуется для низкой латентностью (но более низкой пропускной способностью)
Для двух радиопередатчиков следующим должнр быть одинаково на обоих концах соединения:
- версия прошивки радио
- AIR_SPEED
- MIN_FREQ
- MAX_FREQ
- NUM_CHANNELS
- NETID
- установка ECC
- установка LBT_RSSI
- установка MAX_WINDOW
Другие параметры могут быть разными на каждом радиомодеме, хотя, как правило, их тоже стоит установить одинаково.
Поддержка в различных странах / регионах
Очень важно, что бы вы знали о местных нормативных актах в стране или регионе о частоте и
уровне мощности и как настроить свой радиомодем правильно для ваших местных правил.
Доступные диапазоны частот
В следующей таблице может быть полезным соответствие с местными правилами радио
Модель радиомодема Минимальная частота (МГц) Максимальная частота (МГц) 433 414,0 454,0 900 895,0 935,0
Настройка рабочего цикла (DUTY_CYCLE)
Большинство пользователей хотят установить DUTY_CYCLE до 100, что является максимальным процентом времени,
что радиомодемы будут передавать пакеты
Причина рабочего цикла заключается в том, что некоторые регионы мира позволяют иметь более высокую мощность
передачи и больше частот, если у вас значение по умолчанию рабочего цикла ниже — его можно повысить. Так напрмер
в Европе вы можете передать в более широком диапазоне частот 433Мгц, если ваш рабочий цикл ниже 10%.
При установке DUTY_CYCLE ниже 100% пропускная полоса будет снижена, так что вы должны это использовать
для телеметрии на более высоких скоростях передачи данных. Значение DUTY_CYCLE 10% практично , что бы получать хорошую
телеметрию.
Для примера вы можете легко получать все потоки телеметрии с частотой 2Гц с AIR_SPEED установленым в 128 ,
включеным ECC и DUTY_CYCLE установленом в 10.
Вы также можете установить радиомодем только на получение установив DUTY_CYCLE в 0. Это будет работать лучше ,
если вы установите NUM_CHANNELS меньшим числам, поскольку в противном случае синхронизация частот будут бедными.
Режим работы с низкой задержкой (low latency mode)
Радиомодемы могут быть настроены на использование в режиме «малого времени задержки» для повышение производительности отклика
от таких устройств как джостики или управление с планшетов и т.д. Эти два параметра необходимо установить, что бы включить этот
режим следующим образом:
Установите MAVLink 2 — это раставляет приоритет для пакетов RC_OVERRIDE используемых в джойстики.
Измените MAW_WINDOW до 33 (по умолчанию 131) — это будет гарантировать , что наземная станция может отправить
пакет на квадрокоптер (или самолет) по крайней мере один раз каждые 33мсек. Стоит отметить, что это снизит полосу пропускания,
так что если вам нужно абсолютное максимальное значение пропускной способности вам нужно использовать значение по умолчанию — 131.
Оба радиомодема на канале должны иметь одинаковое значение этого параметра иначе они не смогут «разговаривать» друг с другом.
LBT — Слушать перед разговором.
Радиомодемы могут использовать режим «слушать перед разговором», что бы позволить выполнять более широкий спектр
региональных нормативных требований. LBT предоставляет собой систему, в которой радиомодему требуется
время для прослушивания в течении периода времени и его сигнал не видем для других радиомодемов.
Используя не нулевое значение LBT_RSSI ваш радиомодем станет более «вежливым» ожидая пока все остальные передачи закончатся,
прежде чем передавать свой сигнал.
Что бы включить LBT в вашем радиомодеме вам необходимо установить порог LBT_RSSI.. Это сила сигнала, что радиомодем считает признаком
того, что канал радиопередачи занят. Если вы установите LBT_RSSI к нулю, то LBT будет отлючена.
Минимальная не нулевая установка равна 25, которая является несколько больше дБ приема чувствительности радио (-121 дБм).
Для настройки LTB_RSSI вы должны знать, что ваш уровень сигнала соответствует местному положению о радиосвязи для LBT.
Каждое приращение в LBT_RSSI выше 25 примерно равна 0.5 дБ, выше чувствительности радиомодема. Если вы установите
LBT_RSSI до 40, то радиомодем будет считпть канал свободным, если уровень сигнала меньше 7.5 дБ выше чувствительности приемника.
Кроме того, вы можете использовать эту формулу, что бы получить нужную мощность принимаемого сигнала в дБм:
signal_dBm = (RSSI / 1,9) — 127
Эта формула является приближенной, но достаточна близка. Смотрите спецификацию вашего чипа,
как правило это Si1000 для более точного значения.
Вам нужно будет
Вам нужно будет найти нормативные требования, что бы использовать LBT_RSSI параметр
LBT внедрение в радио 3dr использует минимум слушать время 5 мс, плюс рандомизированы слушать время
в соответствии с европейскими правилами 9.2.2.2.
Обратите внимание, что во многих регионах необходимо реализовать LBT в сочетании с AFA (Adaptive Frequency ловкости).
3DR Радио реализует AFA тех пор, пока у вас есть NUM_CHANNELS установленные до более чем 1.
Технические детали
При оценке, если это радио отвечает вашим местным правилам может быть полезно знать, что технология использует.
Прошивки реализует со скачкообразной перестройкой частоты с расширением спектра (FHSS) с синхронной адаптивная временным разделением каналов (TDM).
В частности, радио делит частотный диапазон между MIN_FREQ + дельты и MAX_FREQ-дельта в NUM_CHANNELS каналов. Значение ‘дельта’ охранник диапазон для того, чтобы мы держаться подальше от краев разрешенной зоны. Диапазон Guard установлен на половину ширины канала. Ширина канала определяется как:
channel_width = (MAX_FREQ — MIN_FREQ) / (NUM_CHANNELS + 2)
Кроме того, радио искажает базовую частоту до одного канала с использованием случайного семя на основе NetID. Это означает, что две радиостанции, использующие разные цифры NetID использовать несколько различных частот.
Радиостанции использовать GFSK (Gaussian Frequency Shift Keying) для передачи на определенной частоте.
TDM работает, разделяя время на кусочки, по мультипликаторам 16 микросекунд клещей. Время нарезки разработан, чтобы дать максимальное время задержки на любой частоте 0,4 с (это для соответствия правилам). Алгоритм TDM затем работает следующим образом:
Параметры EEPROM определить набор параметров TDM, в частности, окна передачи и периода молчания, оба находятся в 16 микросекунд единиц. Вы можете просмотреть результаты, используя ATI6.
Окно передачи масштабируется, чтобы позволить в течение 3 полноразмерных пакетов, которые должны передаваться
как период молчания является равно удвоенному времени ожидания пакета, для данной скорости передачи данных
Два радио автоматически синхронизировать свои часы, добавив 13 бит информации метки времени для всех пакетов. Отметка в 16 микросекунд единиц.
Каждая радио только передает, когда это ‘их очередь ». Так радио получает одно окно передачи ценность времени, то есть период молчания, когда ни радио передает, то другая радиостанция получает свою очередь. Мы никогда не должны ситуацию, когда обе радиостанции передают в то же время
передающих каналов организованы в случайной последовательности на основе NetID
частота изменяется на следующий канал в два раза за каждый полный TDM раунде, в течение периодов молчания
когда не передает данные, что приходит в течение последовательного порта в буфер в буфер 2048 байт
чтобы предотвратить буфер становится слишком много данных (что увеличивает латентность и риски переполнения) радиостанции отправить информацию о том, как полный буфер с подключенным устройством. Код APM адаптирует свои ставки телеметрии от небольших количествах, чтобы держать количество буферных данных разумно.
Алгоритм TDM также адаптивная, в том смысле, что, когда настала очередь радио А для передачи, он может отправить небольшой маркер радио B говоря «Мне не нужно, чтобы отправить либо прямо сейчас, вы можете взять остальную часть мой кванта «. Вот как ссылка авто-баланс для асимметричных нагрузок
Во время первого обыска на другом радио, и в любое время связь теряется, радиостанции переходит в режим, где они движутся частоту приема очень медленно, но двигаться частоту передачи с нормальной скоростью. Это позволяет две радиостанции, чтобы найти друг друга для начальной тактовой синхронизации. Как долго это происходит, зависит от числа каналов, скорость передачи данных воздуха и скорости потери пакетов.
В некоторых регионах может потребоваться знать распределение излучаемой энергии в течение каждого канала. Это зависит от целого ряда факторов, но в основном девиации частоты, используемой для GFSK модуляции. Следующая формула даст вам оценку отклонения частоты:
frequency_deviation = air_data_rate * 1,2 мин отклонение частоты отклонение = 40 макс частота = 159
где frequency_deviation в кГц, а air_data_rate в килобит в секунду.
Использование двунаправленного усилителя для очень больших расстояниях
Вы можете объединил 3dr Радио с двунаправленным усилителем для того, чтобы расширить диапазон до очень больших расстояниях.
Мы имели много успешных испытаний усилителей, сделанных
Ширин
. В частности, Ширин были достаточно любезны, чтобы пожертвовать усилитель 900MHz, который мы тестировали с парой 900MHz 3dr радиостанций.
Этот усилитель дает 12 дБ усиления передачи, и 18дБ усиления приема, автоматически переключаясь между режимах передачи и приема при запуске радио и прекращает передачу. Он может либо работать на 5V с UBEC, или можете использовать встроенную импульсный стабилизатор с 2S или литиевый 3S!.
Мы протестировали этот усилитель на одном конце связи между двумя холмами в Канберре, Австралия 7.6km. На одном конце у нас был простой проволочную антенну, и на другом конце у нас был дешевый eBay 3.5dBi всенаправленной антенной, плюс усилитель Ширин.
Это было испытательный стенд в конце без усилителя
Со следующей установкой:
S0: ФОРМАТ = 22
S1: SERIAL_SPEED = 9
S2: AIR_SPEED = 24
S3: NETID = 25
S4: TxPower = 14
S5: ECC = 1
S6: MAVLINK = 1
S7: OPPRESEND = 1
S8: MIN_FREQ = 915000
S9: MAX_FREQ = 928000
S10: NUM_CHANNELS = 50
мы обнаружили, что мы получили отличный ссылку на 7,6 км диапазоне. Затем мы постепенно снизила мощность передачи на каждом конце линии для того, чтобы измерить ‘выцветанию запас », позволяющий оценить, как далеко радиостанции могут передавать на полной мощности. Мы обнаружили, что запас на замирание было около 12 дБ на обоих концах, откуда следует, что радио должно было быть в состоянии поддерживать связь примерно 4x диапазоне мы тестировали более.
Обратите внимание, что если вы используете усилитель (или высокий коэффициент усиления антенны) вы должны быть очень осторожны, чтобы не превысить уровень ЭИИМ, что ваши местные правила позволяют.
Мониторинг качества связи
Вы можете использовать поддержку MAVLink в 3dr Радио контролировать качество связи во время полета, если ваш наземная станция поддерживает его.
Два ключевых параметра сообщения являются RADIO.rssi и RADIO.remrssi. Первый RSSI (уровень сигнала) уровня, что местное радио приема, по меньшей. Remrssi параметр RSSI, что удаленный радиостанция принимает на.
Вот типичный график уровней RSSI для полета на моем местном летном поле.
Значение ИНПС весы примерно в 1.9x силы сигнала дБм, плюс смещение. Смотреть Паспорт Si1000 для точного соответствия между ПУПС и дБм уровень принимаемого сигнала, или использовать эту приближенную формулу
signal_dBm = (RSSI / 1,9) — 127
Причина RSSI меняется так много во время этого полета является то, что сигнал ослабляется, когда самолет перевернулся в свою очередь, как я был с помощью простой проволочную антенну на плоскости. Значения RSSI для этого полета были много достаточно высока для качества канала связи, чтобы быть превосходным в течение всего полета, используя параметры по умолчанию радио.
Какой диапазон я могу рассчитывать?
Наиболее распространенный вопрос о телеметрии радио каком диапазоне вы можете получить с ним. Это также вопрос трудно ответить, так как это зависит от многих факторов.
Мы сделали много испытательных полетов, чтобы попытаться оценить, какое практическое спектр этих радиостанций является с небольшими всенаправленные антенны и не усилителей. Вот типичный результат:
В этом случае 3DR 900 радиостанции были установки с параметрами по умолчанию, за исключением того, что TxPower был установлен на 2 дБм, что означает, что они передают только с 1,6% от максимальной мощности. Теоретически, радио диапазоне паре с каждого дополнительного 6 дБ мощности передачи, поэтому диапазон достигается с этим тестом должно быть около 1/8 части диапазона, что радио может достичь при скорости воздуха 64 кБ. Вот почему выше график показывает расстояние в метрах раз 8. Это было на крошечном модели SkyFun, и я хотел, чтобы удержать самолет, где я мог видеть это, и именно поэтому я сделал тест с пониженной мощности передачи, а не просто летать это большое расстояние.
Радиостанции держали идеальный ссылку на протяжении всего этого полета, поэтому мы уверены, что эти радиостанции добьется в нескольких километрах располагаются в практике. В данном конкретном случае я летать с небольшим ‘проволочной антенны’ в SkyFun и использует дешевый eBay 3.5dBi антенну на наземной станции.
Конечно, диапазон будет значительно лучше, если бы я уронил скорость передачи данных воздушные. Я считаю, 64kbps, чтобы быть хорошим курс для общего пользования, но я предпочитаю использовать 24 кбит, если я хотел, чтобы проверить на больших расстояниях.
Диапазон этих радиостанций было также подтверждено другими пользователями. Например, я был направлен журнал показывая хорошую связь сохраняется после полета 4,5 км от базовой станции, используя настройки по умолчанию радио для 3dr 900 радио. Это было с помощью небольшого уни антенну в плоскости, и патч антенну 8dB на наземной станции. Уровень сигнала в журнале предполагает, что это, возможно, пошли совсем немного дальше.
Диагностика проблем дальности
Если вы получаете меньше диапазон, чем можно ожидать от вышеуказанной информации, то, что вам нужно сделать, это график уровней шума и сигнала от полета, чтобы решить то, что проблема есть.
Наиболее распространенным источником проблем дальности шум. Шум нежелательных радиоизлучений в том же диапазоне частот, что ваше радио, используя, что мешает работе вашего радио. В 3DR радиостанции имеют регистрация телеметрии построена, чтобы помочь вам диагностировать источник шума.
Есть три основных типа шума, которые могут повлиять на ваши 3dr радио
шум от электроники в авиации (например, ваш двигатель, ESC, APM и т.д.)
шум от вашего наземной станции компьютере, особенно его USB шине
шум от других людей, работающих радиостанций неподалеку, которые находятся на той же частоте, как ваши 3dr радио
Чтобы разобраться, что то шум у вас есть, открывают планировщик миссии и выберите вкладку «Журналы телеметрии». Затем выберите «TLOG>
Kml или Graph «. Когда окно выскакивает выберите «Graph Вход» и выберите журнал из испытательного полета с ваших радиоприемников. Подождите журнал для загрузки, затем выберите следующие пункты войти:
RSSI
remrssi
шум
remnoise
Положите все 4 значения на одном графике. Вы будете в конечном итоге с участком, как это:
Это график показывает вам 4 вещи:
количество принимаемого сигнала на земле
количество принимаемого сигнала в самолете
количество шума принимается на земле
количество шума принимается в самолете
Для наилучшего диапазоне вы хотите две шумовые линии, чтобы быть низким, а два сигнальных линий на высоком уровне. В приведенном выше графике (взято из моего SkyFun с парой 3DR-433 радиоприемников) вы можете увидеть, что уровень шума в плоскости выше, чем уровень шума на земле. Также отметим, что в начале полета (до этого я завел мотор) уровень шума в самолете были ниже, то они поднялись после того как я завел мотор. Это показывает, я получаю некоторый шум от моего двигателя. Если бы я хотел больше диапазон я должен был бы двигаться радио дальше от двигателя и ESC.
Пожалуй, самым распространенным источником шума с 3dr-433 является шум от шины USB на вашем наземной станции. Это показывает, как высокие значения величины RADIO.noise. Если вы получаете это, то вы можете попробовать использовать другой USB кабель или другой ноутбук. Вы также можете попробовать использовать концентратор USB между вашим ноутбуком и вашего радио.
Если ‘RSSI »и« шума »уровни удовлетворения на графике, то вы потеряете связь. Чтобы определить, что ваш диапазон будет, грубо эмпирическое правило вычесть ‘RSSI »и« шумом »номера, а затем разделить на 2. Это говорит вам ваше» Fade запас «в децибелах. Для каждого 6 дБ от выцветанию маржи ваш диапазон удваивается. Так что если у вас есть 18 дБ из выцветанию маржи, то вы сможете сделать примерно 8x любой диапазон вы были в том, когда вы измерили запас.
Другим основным источником проблем дальности является размещение антенны. Ваш наземная станция антенна должна быть подальше от препятствий и пару метров от земли. Возможно, вам придется построить стенд провести его, чтобы получить лучший выбор.
Обновление прошивки радио
Прошивка для 3dr радио с открытым исходным кодом, а также новые возможности добавляются регулярно. Вы должны проверять наличие новых релизов регулярно, чтобы получить максимальную отдачу от ваших радиоприемников.
Самый простой способ обновить использует Planner APM Mission. Перейти в экране конфигурации 3DR радио и использовать кнопку ‘загрузки микропрограммы’.
После обновления, пожалуйста, внимательно проверьте все настройки. Обновление прошивки может изменить настройки на значения по умолчанию, если формат EEPROM изменилось.
Рекомендуем вам ввязываться в развитии прошивки. Начните с изучения
Источник прошивки код
и внести некоторые патчи!
Принуждение режим загрузчика
Если вы так или иначе удается получить ваше радио в состоянии, когда вы не можете загрузить новую прошивку через планировщик миссии, то вы, возможно, потребуется, чтобы заставить радио в режим загрузчика.
Путь загрузка микропрограммы нормально работает является планировщик подключается к радио и посылает команду AT & UPDATE поставить радио в загрузчика режиме готов к приему новой прошивки. Это работает, только если планировщик может отправить AT команд в радио.
Если вы не можете отправить AT команд, то вы можете заставить режим загрузчика замыканием CTS и выводы земли по радио во время включения. Красный светодиод загорается при в режим загрузчика.
На воздушных радиостанций ТТ и контактами заземления легко найти, как они обозначены на задней радио (они являются одними из контактов разъема FTDI). На радио USB это не так очевиден, поэтому эта схема может помочь:
После того как вы радио в режим загрузчика вы должны быть в состоянии загрузить прошивку.
3DR Радио Форум
—>
Ранее в заметке Как я собирал свой первый квадрокоптер на базе PixHawk была описана, так сказать, базовая комплектация квадрокоптера — полетный контроллер, рама, ESC, моторы, пропеллеры, и так далее. Это минимум, необходимый для получения чего-то, что летает. Однако на таком квадрокоптере вы далеко не улетите, так как по мере удаления от вас он очень быстро превращается в небольшое черное пятнышко на небе. Да и не очень-то безопасно на нем летать. В частности, при потере связи с аппаратурой или сильном разряде аккумулятора лучшее, что может сделать квадрокоптер — это успеть автоматически приземлиться (в реку, на дерево, или кому-нибудь на голову). Давайте же выясним, как можно решить эти проблемы.
Ниже приведен полный список новых компонентов, использованных мной в квадрокоптере. Забегая немного вперед, отмечу, что вам может понадобится далеко не все из этого списка.
- Power Module для PixHawk/APM;
- Ublox NEO M8N, GPS-модуль для PixHawk/APM со складной мачтой;
- Набор для FPV: камера 900TVL, TFT-монитор UUUStore 800x480 с козырьком и держателем, приемник RC832, передатчик TS832;
- Модуль телеметрии RadioLink PRM-02;
- Mobius Action Camera;
- Mobius Action Camera AV Output Cable;
- LC-фильтр;
- G.T.POWER 3 Channel Video Switcher;
- Шасси для рамы F450;
- Подвес для камеры с серводвигателями в комплекте;
- Дэмпфер для PixHawk;
- Дэмпфер для Mobius Action Camera;
- Дэмпфер для подвеса;
Суммарная стоимость перечисленных компонентов составила 225$ (по курсу на момент покупки) с доставкой в Россию. Как можно заметить, в наборе две камеры. Mobius Action Camera с широким углом обзора была установлена впереди квадрокоптера в фиксированном положении, а камеру из набора для FPV я установил внизу квадрокоптера, на управляемом при помощи двух серводвигателей подвесе. На первых порах можно обойтись и без дополнительной экшн-камеры, и, соответственно, без переключателя между камерами, да и большинства других наворотов. Строго говоря, из приведенного списка только первые три позиции являются действительно обязательными. Их общая стоимость составляет 98$.
Примечание: Еще из сравнительно недорогих, но качественных экшн-камер, пригодных для FPV, большой популярностью пользуются камеры под брендом RunCam.
Вес квадрокоптера в собранном виде составил 1.45 кг. Выглядит он как-то так:

Интересно, что при этом квадрокоптер влез в сумку 43x40x19 см (понятное дело, со снятыми винтами) вместе с аппаратурой, экраном, запасной батареей, зарядным устройством и ремкомплектом. Вес собранной сумки составляет 5.2 кг. То есть, вполне приемлемо для транспортировки даже общественным транспортом, не говоря уже об автомобиле.
Как вы к этому моменту уже могли догадаться, я не стану утомлять вас нудными подробностями на тему что к чему подключается и как настраивается в APM Planner. Там все более-менее интуитивно понятно, к тому же, есть множество видео на YouTube. Ограничусь лишь несколькими замечаниями.
Начну с того, что я перешел на аппаратуру RadioLink AT9S, подаренную мне на день рожденья. Она оказалась существенно лучше моей предыдущей RadioLink T8FB. Во-первых, у нее 10 каналов, а не 8. Во-вторых, она имеет экранчик и может быть полностью настроена в полевых условиях, безо всякого компьютера и кривого конфигуратора под Windows с интерфейсом на китайском языке. В-третьих, у нее не срывает USB-разъем или иные компоненты. В-четвертых, в нее нормально влезает аккумулятор, а не впритык и с большим усилием. Наконец, для нее есть модуль телеметрии (см выше), который превосходно интегрируется с PixHawk. Вся телеметрия (GPS-координаты, скорость, высота, заряд аккумулятора, режим полета, …) выводится на экранчик RadioLink AT9S. В общем, правду говорят — лучше сразу брать нормальную аппаратуру.
Начиная заниматься авиамоделизмом, я не мог понять, зачем может понадобится больше восьми каналов. Давайте посчитаем:
- Четыре канала, понятно, нужно для стиков;
- Два канала уходят для управления двумя серводвигателями в подвесе камеры. Я выделил каналы 6 и 7, повесив на них потенциометры VrC и VrD. Они находящиеся у аппаратуры сзади, как раз чтобы их было удобно двигать указательными пальцами.
- Еще один канал нужен для переключения камеры. Я выделил канал 10, повесив на него трехпозиционный переключатель SwG, находящийся на аппарате справа. При этом среднее положение переключателя пока не используется, что в будущем позволит добавить еще одну камеру или включать/выключать OSD.
- И еще один канал нужен для переключения режимов полета. Я лично использовал канал 5, повесив на него трехпозиционный переключатель SwE и двухпозиционный SwF, находящиеся на аппаратуре с левой стороны. Таким образом, аппаратура позволяет переключаться между шестью режимами полета. Из них как минимум три нужны обязательно: это Land (без него вы квадрокоптер нормально не посадите), Stabilize (обычный режим полета) и RTL (автоматический возврат на точку запуска, если что-то пошло не так).
Итого 8 каналов занято. Если дополнительно понадобится, например, управлять подсветкой или шасси, каналов уже не хватит. В моем случае остались неиспользуемыми каналы 8 и 9. На них я повесил переключатели SwD и SwH, на будущее.
Еще раньше я думал, что GPS в квадрокоптере — это что-то прикольное, но не обязательное. Сейчас же я больше склоняюсь к мысли, что без него летают только ненормальные (ну или, понятно, владельцы гоночных квадрокоптеров, но это совсем другая история). Потому что GPS-модуль стоит в районе 20$ и позволяет:
- Настроить failsafe так, чтобы при потери связи с аппаратурой или разряде аккумулятора до определенного уровня, квадрокоптер автоматически возвращался к точке запуска. Мой квадрокоптер эта возможность один раз уже спасла;
- Даже если связь нормальная и аккумулятор не разряжен, удобно автоматически возвращать квадрокоптер к месту запуска, переведя его в режим полета RTL;
- В случае крушения квадрокоптер можно найти по последним известным GPS-координатам;
- Можно летать по заранее построенному маршруту, в том числе за пределами радиуса действия аппаратуры;
- Можно настроить «виртуальный купол», за пределы которого квадрокоптеру вылетать запрещено;
- Наконец, GPS-модуль вместе со встроенным в него дополнительным компасом, существенно увеличивают стабильность полета. В том числе, квадрокоптер может удерживать позицию в пространстве при порывистом ветре;
Что же касается самого FPV, тут мне как-то нечего особо добавить. Картинка отображается, камеры переключаются, подвес вращается. Можно смотреть, что там происходит внизу с высоты птичьего полета, а при желании — даже записывать. Прикольно.
По большому счету, это все, чем я хотел сегодня поделиться. Сожалею, что заметка получилась несколько сумбурной. Если у вас возникли какие-то вопросы, я постараюсь ответить на них в комментариях.
А летаете ли вы по FPV и если да, то какие модули для этого используете?
Метки: Электроника.