INAV Configurator
INAV Configurator is a crossplatform configuration tool for the INAV flight control system.
It runs as an app within Google Chrome and allows you to configure the INAV software running on any supported INAV target.
Various types of aircraft are supported by the tool and by INAV, e.g. quadcopters, hexacopters, octocopters and fixed-wing aircraft.
Support
INAV Configurator comes as is, without any warranty and support from authors. If you found a bug, please create an issue on GitHub.
GitHub issue tracker is reserved for bugs and other technical problems. If you do not know how to setup
everything, hardware is not working or have any other support problem, please consult:
- INAV Discord Server
- INAV Official on Facebook
- RC Groups Support
- INAV Official on Telegram
INAV Configurator start minimized, what should I do?
You have to remove C:Users%Your_UserNname%AppDataLocalinav-configurator folder and all its content.
Alternatively, on Windows with PowerShell you can use post_install_cleanup.ps1 script that will do the cleaning. (thank you James Cherrill)
Installation
Depending on target operating system, INAV Configurator is distributed as standalone application or Chrome App.
Windows
- Visit release page
- Download Configurator for Windows platform (win32 or win64 is present)
- Extract ZIP archive
- Run INAV Configurator app from unpacked folder
- Configurator is not signed, so you have to allow Windows to run untrusted application. There might be a monit for it during first run
Linux
- Visit release page
- Download Configurator for Linux platform (linux32 and linux64 are present)
- Extract tar.gz archive
- Make the following files executable:
- inav-configurator
chmod +x inav-configurator - (5.0.0+) chrome_crashpad_handler
chmod +x chrome_crashpad_handler
- inav-configurator
- Run INAV Configurator app from unpacked folder
On some Linux distros, you may be missing libatomic, a NW.JS (specially libnode.so) dependency. If so, please install libatomic using your distro’s package manager, e.g:
- Arch Linux:
sudo pacman -S --needed libatomic_ops - Debian / Ubuntu:
sudo apt install libatomic1 - Fedora:
sudo dnf install libatomic
Mac
- Visit release page
- Download Configurator for Mac platform
- Extract ZIP archive
- Run INAV Configurator
- Configurator is not signed, so you have to allow Mac to run untrusted application. There might be a monit for it during first run
Building and running INAV Configurator locally (for development or Linux users)
For local development, node.js build system is used.
- Install node.js
- From project folder run
npm install - To build the JS and CSS files and start the configurator:
- With NW.js: Run
npm start. - With Chrome: Run
npm run gulp. Then openchrome://extensions, enable
theDeveloper mode, click on theLoad unpacked extension...button and select theinav-configuratordirectory.
- With NW.js: Run
Other tasks are also defined in gulpfile.js. To run a task, use node ./node_modules/gulp/bin/gulp.js task-name. Available ones are:
- build: Generate JS and CSS output files used by the configurator from their sources. It must be run whenever changes are made to any
.jsor.cssfiles in order to have those changes appear
in the configurator. If new files are added, they must be included ingulpfile.js. See the comments at the top ofgulpfile.jsto learn how to do so. See also thewatchtask. - watch: Watch JS and CSS sources for changes and run the
buildtask whenever they’re edited. - dist: Create a distribution of the app (valid for packaging both as a Chrome app or a NW.js app)
in the./dist/directory. - release: Create NW.js apps for each supported platform (win32, osx64 and linux64) in the
./apps
directory. Running this task on macOS or Linux requires Wine, since it’s needed to set the icon
for the Windows app. If you don’t have Wine installed you can create a release by running the release-only-linux task.
--installerargument can be added to build installers for particular OS. NOTE: MacOS Installer can be built with MacOS only.
To build a specific release, use the command release --platform="win64" for example.
Running with debug | Inspector
To be able to open Inspector, you will need SDK flavours of NW.js
npm install nw@0.61.0 --nwjs_build_type=sdk
Different map providers
INAV Configurator 2.1 allows to choose between OpenStreetMap, Bing Maps (Aerial View), and MapProxy map providers.
INAV Configurator is shipped WITHOUT API key for Bing Maps. That means: every user who wants to use Bing Maps has to create own account, agree to all Terms and Conditions required by Bing Maps and configure INAV Configuerator by himself.
How to choose Map provider
- Click Settings icon in the top-right corner of INAV Configurator
- Choose provider: OpenStreetMap, Bing, or MapProxy
- In the case of Bing Maps, you have to provide your own, personal, generated by you, Bing Maps API key
- For MapProxy, you need to provide a server URL and layer name to be used
How to get Bing Maps API key
- Go to the Bing Maps Dev Center at https://www.bingmapsportal.com/.
- If you have a Bing Maps account, sign in with the Microsoft account that you used to create the account or create a new one. For new accounts, follow the instructions in Creating a Bing Maps Account.
- Select My keys under My Account.
- Select the option to create a new key.
- Provide the following information to create a key:
- Application name: Required. The name of the application.
- Application URL: The URL of the application. This is an optional field which is useful in helping you remember the purpose of that key in the future.
- Key type: Required. Select the key type that you want to create. You can find descriptions of key and application types here.
- Application type: Required. Select the application type that best represents the application that will use this key. You can find descriptions of key and application types here.
- Click the Create button. The new key displays in the list of available keys. Use this key to authenticate your Bing Maps application as described in the documentation for the Bing Maps API you are using.
How to setup a MapProxy server for offline caching and mission planning
- Follow process described in MAPPROXY.md
- Test your MapProxy server in web browser, eg: http://192.168.145.20/inavmapproxy/
- Once you have a working MapProxy server choose MapProxy as your map provider
- Enter MapProxy service URL, eg: http://192.168.145.20/inavmapproxy/service?
- Enter MapProxy service layer (inav_layer if configured from MAPPROXY.md)
- Once completed, you can zoom in on area you will be flying in while connected to the internet in either GPS or Mission Control tab to save the cache for offline use
Font Customisation
INAV provides the font images so that custom fonts can be created for your personal preference. This is the case for both analogue and digital fonts. The resources can be found in the osd folder. Within the analogue and digital subfolders, you will find information on compiling your own fonts. There is also an INAV Character Map document. This contains previews of all the character images in the fonts, and the appropriate variable names within the firmware and Configurator. There are tools for compiling the analogue and digital fonts. New font submissions via pull requests are welcome.
Notes
WebGL
Make sure Settings -> System -> «User hardware acceleration when available» is checked to achieve the best performance
Linux users
- Dont forget to add your user into dialout group «sudo usermod -aG dialout YOUR_USERNAME» for serial access
- If you have 3D model animation problems, enable «Override software rendering list» in Chrome flags chrome://flags/#ignore-gpu-blacklist
Issue trackers
For INAV configurator issues raise them here
https://github.com/iNavFlight/inav-configurator/issues
For INAV firmware issues raise them here
https://github.com/iNavFlight/inav/issues
Developers
We accept clean and reasonable patches, submit them!
INAV Configurator
INAV Configurator is a crossplatform configuration tool for the INAV flight control system.
It runs as an app within Google Chrome and allows you to configure the INAV software running on any supported INAV target.
Various types of aircraft are supported by the tool and by INAV, e.g. quadcopters, hexacopters, octocopters and fixed-wing aircraft.
Support
INAV Configurator comes as is, without any warranty and support from authors. If you found a bug, please create an issue on GitHub.
GitHub issue tracker is reserved for bugs and other technical problems. If you do not know how to setup
everything, hardware is not working or have any other support problem, please consult:
- INAV Discord Server
- INAV Official on Facebook
- RC Groups Support
- INAV Official on Telegram
INAV Configurator start minimized, what should I do?
You have to remove C:Users%Your_UserNname%AppDataLocalinav-configurator folder and all its content.
Alternatively, on Windows with PowerShell you can use post_install_cleanup.ps1 script that will do the cleaning. (thank you James Cherrill)
Installation
Depending on target operating system, INAV Configurator is distributed as standalone application or Chrome App.
Windows
- Visit release page
- Download Configurator for Windows platform (win32 or win64 is present)
- Extract ZIP archive
- Run INAV Configurator app from unpacked folder
- Configurator is not signed, so you have to allow Windows to run untrusted application. There might be a monit for it during first run
Linux
- Visit release page
- Download Configurator for Linux platform (linux32 and linux64 are present)
- Extract tar.gz archive
- Make the following files executable:
- inav-configurator
chmod +x inav-configurator - (5.0.0+) chrome_crashpad_handler
chmod +x chrome_crashpad_handler
- inav-configurator
- Run INAV Configurator app from unpacked folder
On some Linux distros, you may be missing libatomic, a NW.JS (specially libnode.so) dependency. If so, please install libatomic using your distro’s package manager, e.g:
- Arch Linux:
sudo pacman -S --needed libatomic_ops - Debian / Ubuntu:
sudo apt install libatomic1 - Fedora:
sudo dnf install libatomic
Mac
- Visit release page
- Download Configurator for Mac platform
- Extract ZIP archive
- Run INAV Configurator
- Configurator is not signed, so you have to allow Mac to run untrusted application. There might be a monit for it during first run
Building and running INAV Configurator locally (for development or Linux users)
For local development, node.js build system is used.
- Install node.js
- From project folder run
npm install - To build the JS and CSS files and start the configurator:
- With NW.js: Run
npm start. - With Chrome: Run
npm run gulp. Then openchrome://extensions, enable
theDeveloper mode, click on theLoad unpacked extension...button and select theinav-configuratordirectory.
- With NW.js: Run
Other tasks are also defined in gulpfile.js. To run a task, use node ./node_modules/gulp/bin/gulp.js task-name. Available ones are:
- build: Generate JS and CSS output files used by the configurator from their sources. It must be run whenever changes are made to any
.jsor.cssfiles in order to have those changes appear
in the configurator. If new files are added, they must be included ingulpfile.js. See the comments at the top ofgulpfile.jsto learn how to do so. See also thewatchtask. - watch: Watch JS and CSS sources for changes and run the
buildtask whenever they’re edited. - dist: Create a distribution of the app (valid for packaging both as a Chrome app or a NW.js app)
in the./dist/directory. - release: Create NW.js apps for each supported platform (win32, osx64 and linux64) in the
./apps
directory. Running this task on macOS or Linux requires Wine, since it’s needed to set the icon
for the Windows app. If you don’t have Wine installed you can create a release by running the release-only-linux task.
--installerargument can be added to build installers for particular OS. NOTE: MacOS Installer can be built with MacOS only.
To build a specific release, use the command release --platform="win64" for example.
Running with debug | Inspector
To be able to open Inspector, you will need SDK flavours of NW.js
npm install nw@0.61.0 --nwjs_build_type=sdk
Different map providers
INAV Configurator 2.1 allows to choose between OpenStreetMap, Bing Maps (Aerial View), and MapProxy map providers.
INAV Configurator is shipped WITHOUT API key for Bing Maps. That means: every user who wants to use Bing Maps has to create own account, agree to all Terms and Conditions required by Bing Maps and configure INAV Configuerator by himself.
How to choose Map provider
- Click Settings icon in the top-right corner of INAV Configurator
- Choose provider: OpenStreetMap, Bing, or MapProxy
- In the case of Bing Maps, you have to provide your own, personal, generated by you, Bing Maps API key
- For MapProxy, you need to provide a server URL and layer name to be used
How to get Bing Maps API key
- Go to the Bing Maps Dev Center at https://www.bingmapsportal.com/.
- If you have a Bing Maps account, sign in with the Microsoft account that you used to create the account or create a new one. For new accounts, follow the instructions in Creating a Bing Maps Account.
- Select My keys under My Account.
- Select the option to create a new key.
- Provide the following information to create a key:
- Application name: Required. The name of the application.
- Application URL: The URL of the application. This is an optional field which is useful in helping you remember the purpose of that key in the future.
- Key type: Required. Select the key type that you want to create. You can find descriptions of key and application types here.
- Application type: Required. Select the application type that best represents the application that will use this key. You can find descriptions of key and application types here.
- Click the Create button. The new key displays in the list of available keys. Use this key to authenticate your Bing Maps application as described in the documentation for the Bing Maps API you are using.
How to setup a MapProxy server for offline caching and mission planning
- Follow process described in MAPPROXY.md
- Test your MapProxy server in web browser, eg: http://192.168.145.20/inavmapproxy/
- Once you have a working MapProxy server choose MapProxy as your map provider
- Enter MapProxy service URL, eg: http://192.168.145.20/inavmapproxy/service?
- Enter MapProxy service layer (inav_layer if configured from MAPPROXY.md)
- Once completed, you can zoom in on area you will be flying in while connected to the internet in either GPS or Mission Control tab to save the cache for offline use
Font Customisation
INAV provides the font images so that custom fonts can be created for your personal preference. This is the case for both analogue and digital fonts. The resources can be found in the osd folder. Within the analogue and digital subfolders, you will find information on compiling your own fonts. There is also an INAV Character Map document. This contains previews of all the character images in the fonts, and the appropriate variable names within the firmware and Configurator. There are tools for compiling the analogue and digital fonts. New font submissions via pull requests are welcome.
Notes
WebGL
Make sure Settings -> System -> «User hardware acceleration when available» is checked to achieve the best performance
Linux users
- Dont forget to add your user into dialout group «sudo usermod -aG dialout YOUR_USERNAME» for serial access
- If you have 3D model animation problems, enable «Override software rendering list» in Chrome flags chrome://flags/#ignore-gpu-blacklist
Issue trackers
For INAV configurator issues raise them here
https://github.com/iNavFlight/inav-configurator/issues
For INAV firmware issues raise them here
https://github.com/iNavFlight/inav/issues
Developers
We accept clean and reasonable patches, submit them!
Getting started
Where to download?!
Install the latest version of iNav Configurator and use to download and flash firmware. Note that the Chrome app is no longer supported by Google.
Be aware on first boot after a reflash or clean erase INAV tries to auto detect MAG, BARO and SPEED (Pitot-tube). If none are detected it will indicate this with red icons on the sensor bar. It will also fail on Hardware health on the Pre-arming checks. To fix reboot and its fine.
Go through the index on the right side to find useful information.
Hardware needed for GPS assisted modes.
- Multirotors: GPS, magnetometer, barometer.
- Fixed wings: GPS. (Can also use magnetometer and barometer but not needed.)
Video showing how to edit and tailor iNav for you needs.
GPS
iNav supports Ublox, DJI NAZA, NMEA, multiwii’s i2c-nav board and MultiWiiCopter’s i2c-gps modules
Tested and recommend GPS are M8N versions ( example Ublox NEO-M8N and Beitian BN-880 )
But both M6N and M7N should work.
With default iNav settings iNav will configure ublox GPS for you, no need to use software like u-center.
Also be aware that some of our flight controllers can cause interference with the GPS causing low satellites or even no satellites at all, keep GPS as far as possible away and think of either shield your GPS or flight controller and other equipment that can cause interference.
You can learn how to setup your GPS unit for use with iNav on on this page.
Notes / Common issues
-
Old version of iNav configurator, verify that your on the latest version see link. If it has failed to update, simple uninstall configurator and install it again.
-
Unable to enable NAV related modes, See Link for possible reasons for why.
-
iNav does not show «GPS Signal Strength» for each satellite in the Cleanflight configurator, instead only the first one is used to show HDOP
-
iNav has only one PID controller called fp-pid.
-
iNav has extra safety feature that prevents you from arming your aircraft if certain condition are met, or not met. This is controlled by CLI variable «Nav_extra_arming_safety» which is default turned on.
- No valid GPS lock. (Needs 3d lock and more satelites than inav_gps_min_sats)
- Navigation modes are turned on while trying to arm.
-
iNav has other GPS modes than cleanflight, or names them differently. Read this wiki page for how to use them, and combine them to get wanted position hold.
-
If your copter is toilet-bowling, which means, in the beginning it holds its position and then starts to make bigger and bigger circles, you probably have your magnetometer not calibrated correctly or it’s seeing the magnetic field of you power lines or the beeper.
If you are using your FC onboard mag, try to place the the FC as far away as possible from the magnetic interference causing parts e.g. mounting it on/under the top plate on small racers. -
No GPS lock after setting it up and the GPS icon lights up green are often due to electric noise from flight controller or other equipment such as 1.2ghz video TX. Try getting the GPS on a mast and also you can shield using alufoil or copper foil.
-
Barometer is held at 0 meter until first arm, this is to ensure that it starts at 0 meter instead of 10 meters because of temperatur drift. ( This is why raising your flightcontroller while connected to configurator it shows increasing altitude but then is dragged to 0 meter )
-
Always load OSD fonts when starting using a new board from the configurator OSD tab to avoid artifacts on the video feed.
Checklist if you’re having issue with something:
- Try and look through the wiki regarding the issue you have. You can also search the Wiki.
- Read the first post rcgroups Cleanflight iNav thread. Also read the last 5 pages in the thread to see if someone else has already mentioned it. Also try and search in the thread.
- Explain your issue, include CLI dump and blackbox log if you have a logger. Mention what you have tried, and also if it’s working as intended in stock Cleanflight / Earlier versions of iNav
- Template for asking for help
Getting started
Where to download?!
Install the latest version of iNav Configurator and use to download and flash firmware. Note that the Chrome app is no longer supported by Google.
Be aware on first boot after a reflash or clean erase INAV tries to auto detect MAG, BARO and SPEED (Pitot-tube). If none are detected it will indicate this with red icons on the sensor bar. It will also fail on Hardware health on the Pre-arming checks. To fix reboot and its fine.
Go through the index on the right side to find useful information.
Hardware needed for GPS assisted modes.
- Multirotors: GPS, magnetometer, barometer.
- Fixed wings: GPS. (Can also use magnetometer and barometer but not needed.)
Video showing how to edit and tailor iNav for you needs.
GPS
iNav supports Ublox, DJI NAZA, NMEA, multiwii’s i2c-nav board and MultiWiiCopter’s i2c-gps modules
Tested and recommend GPS are M8N versions ( example Ublox NEO-M8N and Beitian BN-880 )
But both M6N and M7N should work.
With default iNav settings iNav will configure ublox GPS for you, no need to use software like u-center.
Also be aware that some of our flight controllers can cause interference with the GPS causing low satellites or even no satellites at all, keep GPS as far as possible away and think of either shield your GPS or flight controller and other equipment that can cause interference.
You can learn how to setup your GPS unit for use with iNav on on this page.
Notes / Common issues
-
Old version of iNav configurator, verify that your on the latest version see link. If it has failed to update, simple uninstall configurator and install it again.
-
Unable to enable NAV related modes, See Link for possible reasons for why.
-
iNav does not show «GPS Signal Strength» for each satellite in the Cleanflight configurator, instead only the first one is used to show HDOP
-
iNav has only one PID controller called fp-pid.
-
iNav has extra safety feature that prevents you from arming your aircraft if certain condition are met, or not met. This is controlled by CLI variable «Nav_extra_arming_safety» which is default turned on.
- No valid GPS lock. (Needs 3d lock and more satelites than inav_gps_min_sats)
- Navigation modes are turned on while trying to arm.
-
iNav has other GPS modes than cleanflight, or names them differently. Read this wiki page for how to use them, and combine them to get wanted position hold.
-
If your copter is toilet-bowling, which means, in the beginning it holds its position and then starts to make bigger and bigger circles, you probably have your magnetometer not calibrated correctly or it’s seeing the magnetic field of you power lines or the beeper.
If you are using your FC onboard mag, try to place the the FC as far away as possible from the magnetic interference causing parts e.g. mounting it on/under the top plate on small racers. -
No GPS lock after setting it up and the GPS icon lights up green are often due to electric noise from flight controller or other equipment such as 1.2ghz video TX. Try getting the GPS on a mast and also you can shield using alufoil or copper foil.
-
Barometer is held at 0 meter until first arm, this is to ensure that it starts at 0 meter instead of 10 meters because of temperatur drift. ( This is why raising your flightcontroller while connected to configurator it shows increasing altitude but then is dragged to 0 meter )
-
Always load OSD fonts when starting using a new board from the configurator OSD tab to avoid artifacts on the video feed.
Checklist if you’re having issue with something:
- Try and look through the wiki regarding the issue you have. You can also search the Wiki.
- Read the first post rcgroups Cleanflight iNav thread. Also read the last 5 pages in the thread to see if someone else has already mentioned it. Also try and search in the thread.
- Explain your issue, include CLI dump and blackbox log if you have a logger. Mention what you have tried, and also if it’s working as intended in stock Cleanflight / Earlier versions of iNav
- Template for asking for help
INAV Configurator
INAV Configurator is a crossplatform configuration tool for the INAV flight control system.
It runs as an app within Google Chrome and allows you to configure the INAV software running on any supported INAV target.
Various types of aircraft are supported by the tool and by INAV, e.g. quadcopters, hexacopters, octocopters and fixed-wing aircraft.
Support
INAV Configurator comes as is, without any warranty and support from authors. If you found a bug, please create an issue on GitHub.
GitHub issue tracker is reserved for bugs and other technical problems. If you do not know how to setup
everything, hardware is not working or have any other support problem, please consult:
- INAV Discord Server
- INAV Official on Facebook
- RC Groups Support
- INAV Official on Telegram
INAV Configurator start minimized, what should I do?
You have to remove C:Users%Your_UserNname%AppDataLocalinav-configurator folder and all its content.
Alternatively, on Windows with PowerShell you can use post_install_cleanup.ps1 script that will do the cleaning. (thank you James Cherrill)
Installation
Depending on target operating system, INAV Configurator is distributed as standalone application or Chrome App.
Windows
- Visit release page
- Download Configurator for Windows platform (win32 or win64 is present)
- Extract ZIP archive
- Run INAV Configurator app from unpacked folder
- Configurator is not signed, so you have to allow Windows to run untrusted application. There might be a monit for it during first run
Linux
- Visit release page
- Download Configurator for Linux platform (linux32 and linux64 are present)
- Extract tar.gz archive
- Make the following files executable:
- inav-configurator
chmod +x inav-configurator - (5.0.0+) chrome_crashpad_handler
chmod +x chrome_crashpad_handler
- inav-configurator
- Run INAV Configurator app from unpacked folder
On some Linux distros, you may be missing libatomic, a NW.JS (specially libnode.so) dependency. If so, please install libatomic using your distro’s package manager, e.g:
- Arch Linux:
sudo pacman -S --needed libatomic_ops - Debian / Ubuntu:
sudo apt install libatomic1 - Fedora:
sudo dnf install libatomic
Mac
- Visit release page
- Download Configurator for Mac platform
- Extract ZIP archive
- Run INAV Configurator
- Configurator is not signed, so you have to allow Mac to run untrusted application. There might be a monit for it during first run
Building and running INAV Configurator locally (for development or Linux users)
For local development, node.js build system is used.
- Install node.js
- From project folder run
npm install - To build the JS and CSS files and start the configurator:
- With NW.js: Run
npm start. - With Chrome: Run
npm run gulp. Then openchrome://extensions, enable
theDeveloper mode, click on theLoad unpacked extension...button and select theinav-configuratordirectory.
- With NW.js: Run
Other tasks are also defined in gulpfile.js. To run a task, use node ./node_modules/gulp/bin/gulp.js task-name. Available ones are:
-
build: Generate JS and CSS output files used by the configurator from their sources. It must be run whenever changes are made to any
.jsor.cssfiles in order to have those changes appear
in the configurator. If new files are added, they must be included ingulpfile.js. See the comments at the top ofgulpfile.jsto learn how to do so. See also thewatchtask. -
watch: Watch JS and CSS sources for changes and run the
buildtask whenever they’re edited. -
dist: Create a distribution of the app (valid for packaging both as a Chrome app or a NW.js app)
in the./dist/directory. -
release: Create NW.js apps for each supported platform (win32, osx64 and linux64) in the
./apps
directory. Running this task on macOS or Linux requires Wine, since it’s needed to set the icon
for the Windows app. If you don’t have Wine installed you can create a release by running the release-only-linux task.
--installerargument can be added to build installers for particular OS. NOTE: MacOS Installer can be built with MacOS only.
To build a specific release, use the command release --platform="win64" for example.
Running with debug | Inspector
To be able to open Inspector, you will need SDK flavours of NW.js
npm install [email protected] --nwjs_build_type=sdk
Different map providers
INAV Configurator 2.1 allows to choose between OpenStreetMap, Bing Maps (Aerial View), and MapProxy map providers.
INAV Configurator is shipped WITHOUT API key for Bing Maps. That means: every user who wants to use Bing Maps has to create own account, agree to all Terms and Conditions required by Bing Maps and configure INAV Configuerator by himself.
How to choose Map provider
- Click Settings icon in the top-right corner of INAV Configurator
- Choose provider: OpenStreetMap, Bing, or MapProxy
- In the case of Bing Maps, you have to provide your own, personal, generated by you, Bing Maps API key
- For MapProxy, you need to provide a server URL and layer name to be used
How to get Bing Maps API key
- Go to the Bing Maps Dev Center at https://www.bingmapsportal.com/.
- If you have a Bing Maps account, sign in with the Microsoft account that you used to create the account or create a new one. For new accounts, follow the instructions in Creating a Bing Maps Account.
- Select My keys under My Account.
- Select the option to create a new key.
- Provide the following information to create a key:
- Application name: Required. The name of the application.
- Application URL: The URL of the application. This is an optional field which is useful in helping you remember the purpose of that key in the future.
- Key type: Required. Select the key type that you want to create. You can find descriptions of key and application types here.
- Application type: Required. Select the application type that best represents the application that will use this key. You can find descriptions of key and application types here.
- Click the Create button. The new key displays in the list of available keys. Use this key to authenticate your Bing Maps application as described in the documentation for the Bing Maps API you are using.
How to setup a MapProxy server for offline caching and mission planning
- Follow process described in MAPPROXY.md
- Test your MapProxy server in web browser, eg: http://192.168.145.20/inavmapproxy/
- Once you have a working MapProxy server choose MapProxy as your map provider
- Enter MapProxy service URL, eg: http://192.168.145.20/inavmapproxy/service?
- Enter MapProxy service layer (inav_layer if configured from MAPPROXY.md)
- Once completed, you can zoom in on area you will be flying in while connected to the internet in either GPS or Mission Control tab to save the cache for offline use
Font Customisation
INAV provides the font images so that custom fonts can be created for your personal preference. This is the case for both analogue and digital fonts. The resources can be found in the osd folder. Within the analogue and digital subfolders, you will find information on compiling your own fonts. There is also an INAV Character Map document. This contains previews of all the character images in the fonts, and the appropriate variable names within the firmware and Configurator. There are tools for compiling the analogue and digital fonts. New font submissions via pull requests are welcome.
Notes
WebGL
Make sure Settings -> System -> «User hardware acceleration when available» is checked to achieve the best performance
Linux users
- Dont forget to add your user into dialout group «sudo usermod -aG dialout YOUR_USERNAME» for serial access
- If you have 3D model animation problems, enable «Override software rendering list» in Chrome flags chrome://flags/#ignore-gpu-blacklist
Issue trackers
For INAV configurator issues raise them here
https://github.com/iNavFlight/inav-configurator/issues
For INAV firmware issues raise them here
https://github.com/iNavFlight/inav/issues
Developers
We accept clean and reasonable patches, submit them!
Open Source Agenda is not affiliated with «Inav Configurator» Project. README Source: iNavFlight/inav-configurator
Согласно недавнему анонсу, в скором времени Гугл прекратит поддержку Chrome Apps, что приведет к невозможности работы Betaflight Configurator’а и некоторых других программ для мультикоптеров, использующих эту платформу. В этой статье я покажу решение этой проблемы, дам ссылки на автономные версии программ для наших полетных контроллеров.
Оригинал: Download Betaflight Configurator & Blackbox Explorer
С самой первой версии Betaflight Configurator (еще со времен Baseflight и Cleanflight) был расширением для Chrome (Chrome Extension). Мы использовали эту платформу, потому что она совместима с Windows, Linux и Mac OS.
Дополнительная информация: настройка Betaflight
Помимо Betaflight Configurator, также будут затронуты этим и многие другие программы, связанные с нашим хобби, типа BLHeli Configurator и Blackbox explorer. К счастью, разработчики нашли решение, и предлагают использовать автономные версии программ, которые можно запускать без Google Chrome. Эти версии также совместимы с Windows, Linux и Mac OS.
Если эти расширения уже установлены в вашем браузере, то они ещё какое-то время будут работать. Но, как видите, уже нельзя найти их в Chrome Web Store — гугл постепенно закрывает эту платформу, так что чем раньше мы перейдем на автономные версии, тем лучше.
| Логотип | Приложение | Ссылка на приложение |
| Betaflight Configurator | Исполняемые файлы: https://github.com/betaflight/betaflight-configurator/releases | |
| Blackbox Explorer | Инсталлятор: https://github.com/betaflight/blackbox-log-viewer/releases | |
| BLHeli Configurator | Исполняемые файлы: https://github.com/blheli-configurator/blheli-configurator/releases | |
| Cleanflight Configurator | Исполняемые файлы: https://github.com/cleanflight/cleanflight-configurator/releases | |
| iNav Configurator | Исполняемые файлы: https://github.com/iNavFlight/inav-configurator/releases | |
 |
BLHeliSuite_32 | Скачать: https://github.com/bitdump/BLHeli (ссылка в самом низу страницы) |
- Для Windows — расширение файлов «exe»
- Для MacOS — «dmg»
Скачав архив на компьютер, распакуйте его, из полученной папки запускайте betaflight-configurator.exe, устанавливать не обязательно.
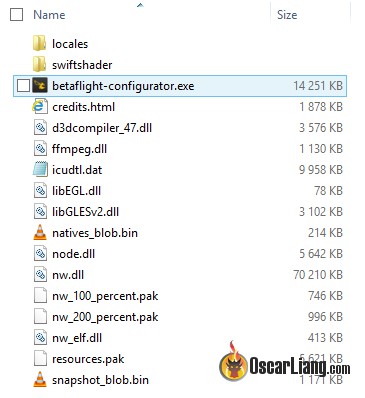
Если будет запрос насчет безопасности файлов, не волнуйтесь, выберите «все равно запустить».
Прим. перев: есть еще один вариант, нужно убрать блокировку с файла, т.к. он скачан из интернета и считается небезопасным. Нажмите правой кнопкой мыши на betaflight-configurator.exe и откройте свойства. Внизу окна будет кнопка «Разблокировать», нажмите её и затем «Ок».
Эту же процедуру нужно проделать с другими программами, кроме Blackbox Explorer у которого уже есть установочный файл, так что просто скачиваем и устанавливаем.
Замечу, что автономные приложения не обновляются автоматически, придется делать это вручную. Для удобства пользователей при появлении новых версий будет появляться всплывающее окно со ссылкой на страницу загрузки.
Не получается установить, появляется предупреждение о небезопасной программе?
Если не получается установить Betaflight configurator как приложение, тогда можно попробовать настроить через Google Chrome.
Первое, клонируем репозиторий GitHub в виде zip архива.
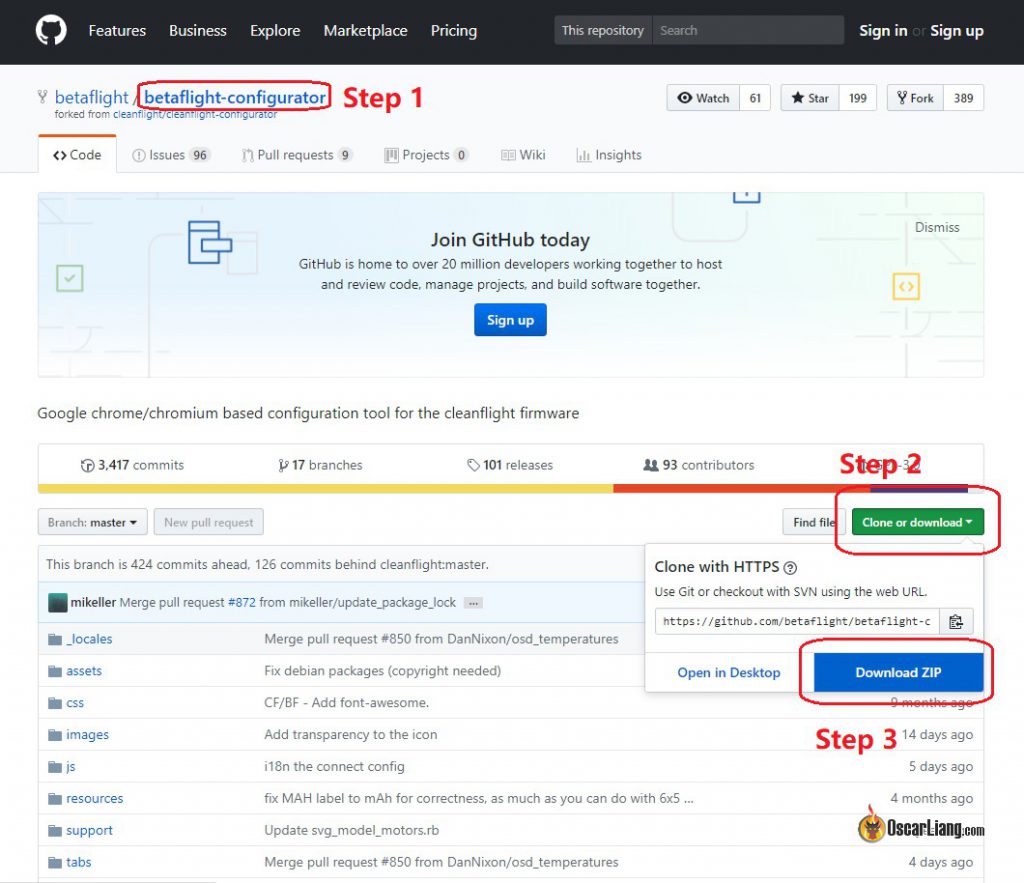
Распаковываем архив, открываем Chrome, переходим на страницу с расширениями, убеждаемся, что режим разработчика включен (developer mode on).
Нажимаем Load Unpacked Extension, выбираем папку, куда мы распаковали архив. На этом всё! Распакованные файлы нужны для работы, так что не удаляйте их.
На выходе мы получаем не отдельное приложение, а расширение Хрома, так что он все еще будет нужен, но зато решается проблема с установкой и с ложными срабатываниями антивирусов.
- Часть 1 — комплектующие
- Часть 2 — сборка
- Часть 3 — пересборка на SPRacingF3
- Часть 5 — выдержки из бортового журнала
- Фотогалерея
Последний этап сборки — установка и настройка прошивки на полётный контроллер. Для начала о самой прошивке. Cleanflight — очень популярная прошивка, но все навигационные функции находятся там в зачаточном состоянии. Поэтому я буду использовать прошивку iNAV. Это ответвление от Cleanflight`а, созданное Константином Шарлаимовым (он же DigitalEntity, он же jShadow) со товарищи и «заточенное» именно под работу с GPS и навигацией. Так как экспериментирую я с данным квадрокоптером уже давно, то и за iNAV слежу уже достаточно долго (с апреля 2016). Надо отдать должное авторам, объём работы проделан огромный. Это хорошо видно по теме обсуждения прошивки на форуме rcdesign.ru, где сам Константин активно общается.
ДИСКЛЕЙМЕР
Во многих аспектах, данная статья выражает субъективное мнение автора. Спорить с ним бесполезно, он упёртый.
Настраивать ранние версии было достаточно сложно, так как использовался Cleanflight Configurator, в то время как по коду iNAV уже очень сильно отличался от прародителя и бОльшую часть команд надо было вводить через CLI. Позднее (примерно, в августе 2016) iNAV обзавёлся собственным конфигуратором iNAV Configurator, что заметно упростило первичную настройку. Также iNAV обладает подробной документацией, часть которой переведена на русский:
- документация на английском
- документация на русском
- документация на русском
- видео по настройке
Последняя версия прошивки на сегодняшний день — 1.5 и именно её я рассматриваю в данной статье. Далее мои варианты настроек с пояснениями.
Вкладка Setup
Здесь производится калибровка датчиков и именно с неё и надо начинать. Начиная с версии 1.5, в прошивку добавлена неотключаемая «защита от дурака», не позволяющая запустить двигатели, если не откалиброваны компас и акселерометр. Процесс очень доступно описан на этой странице. Компас лучше калибровать на улице, где меньше помех. Делается это, как и в Cleanflight, переводом левого стика передатчика в верхний правый угол, а правого — вниз. Квадрокоптер при этом должен быть не заармлен.
Вкладка Ports
Минимум изменений: включил MSP для порта UART3 и GPS для UART2. Скорость для GPS выбрал 57600 (или 19200 при использовании softserial, но такое подключение не рекомендуется).
iNAV Configurator, вкладка Ports

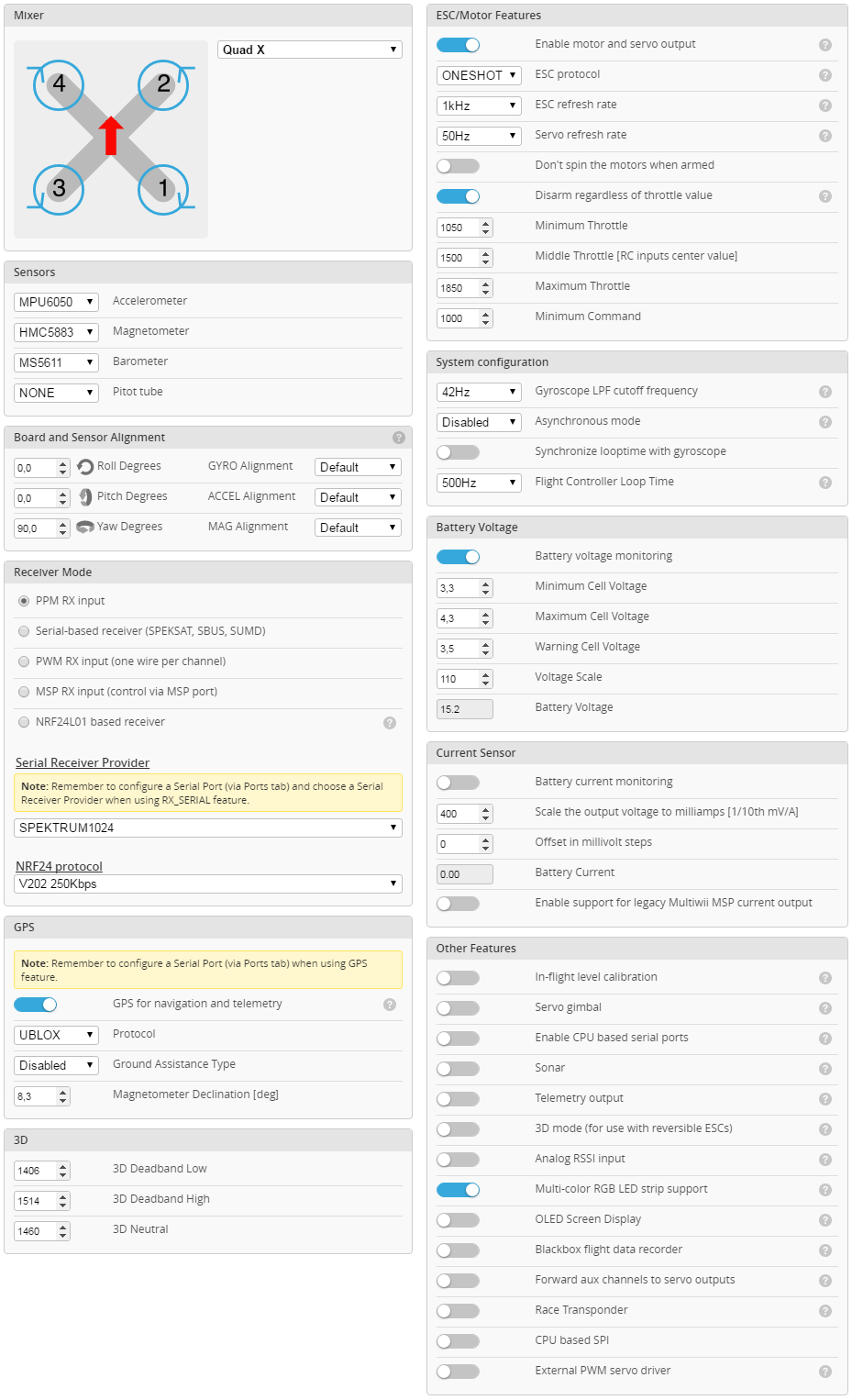
Вкладка Configuration
Здесь настроек много, чтобы было проще, разделю их по блокам.
ESC/Motor Features
- Включил опцию «Enable motor and servo output». Это своего рода защитный механизм, вообще отключающий моторы, чтобы поберечь сервы на самолётных моделях.
- Выбрал протокол регуляторов ONESHOT125 и частоту обновления 1кГц.
- Отключил MOTOR_STOP, чтобы моторы всегда вращались в заармленном состоянии.
- Включил опцию «Disarm motors regardless of throttle value», так как буду делать арминг моторов на отдельном канале. Она позволяет дизармить моторы независимо от уровня газа.
- Уменьшил значение «Minimum Throttle» до 1050. Это обороты холостого хода, подбирал субъективно.
Sensors
Здесь ничего не менял, прошивка сама распознала мои датчики.
Board and Sensor Alignment
Указал, что мой ПК повёрнут на 90 градусов по оси yaw. Корректность этого параметра потом можно проверить во вкладке Setup. Компас у той модели U-blox NEO-M8N, что использую я, бывает повёрнут на 270 или 180 градусов. Кроме того, он расположен на нижней части платы, что тоже надо учитывать. Так что для компаса надо выбирать CW270 FLIP или CW180 FLIP.
Battery Voltage
Включил опцию «Battery voltage monitor» для активации индикатора заряда батареи. Остальные параметры я не менял, так как показания заряда соответствуют действительности. Если же в них есть погрешность, её можно убрать настройкой «Voltage Scale».
Reciever Mode
Выбрал протокол радиоприёмника RX_PPM.
GPS
- Активировал GPS, включив опцию «GPS for navigation and telemetry».
- Установил UBLOX в качестве протокола.
- Задал угол магнитного отклонения. Узнать его для своего местоположения можно здесь.
Other Features
Активировал только одну опцию — «Multi-color RGB LED strip support».
iNAV Configurator, вкладка Configuration
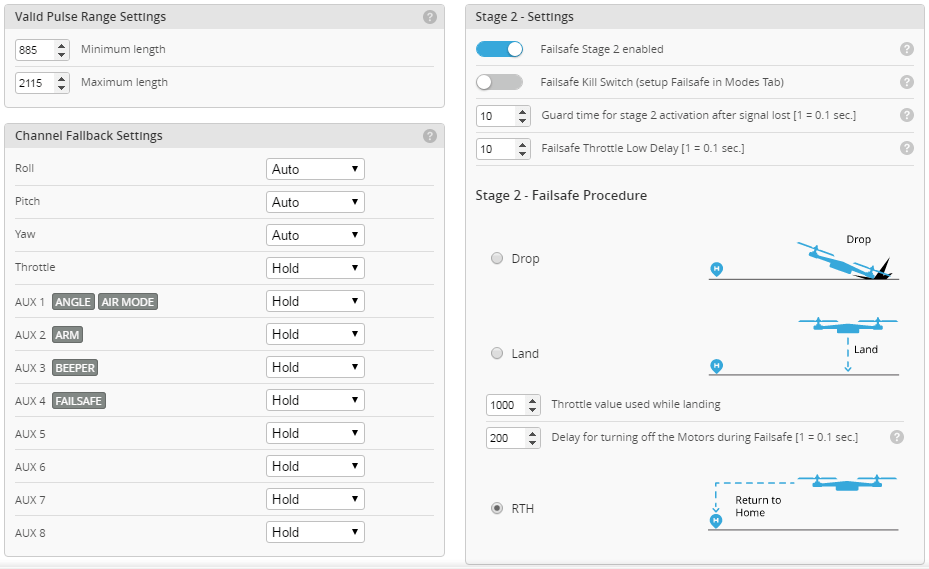
Вкладка Failsafe
О нюансах и настройке этого режима на приёмнике и ПК, я подробно писал тут. В данном случае кое-что изменилось. Во-первых, iNAV предлагает ещё один сценарий поведения — RTH (он же «Return To Home»). Во-вторых, мой новый приёмник Turnigy TGY-iA6C не такой «умный» и не передаёт на ПК сигнал о потере связи. Единственное, что он умеет — эмулировать предустановленные положения стиков/тумблеров. Поэтому единственный вариант настройки в моём случае — назначить Failsafe, как полётный режим, и активировать его на приёмнике при потере сигнала. У себя я это сделал на канале AUX4, к которому не привязан ни один тумблер. Подробности уже писал.
В итоге из настроек я только активизировал «Failsafe Stage 2» и выбрал сценарий RTH в «Failsafe Procedure». Важно, чтобы в разделе «Channel Fallback Settings» для Throttle было установлено значение Hold, иначе ПК будет вырубать моторы.
iNAV Configurator, вкладка Failsafe
Вкладка Modes
К этому моменту все датчики квадрокоптера должны быть включены и опознаны ПК, о чём информирует верхняя плашка с иконками.

Если какой-то из сенсоров не обнаруживается, из списка полётных режимов исчезнут те, которые этот сенсор используют. Например, без барометра не будет режима ALTHOLD, а без GPS — режима POSHOLD. Для начала кратко о некоторых из режимов.
- ANGLE — режим со стабилизацией, для которого можно задать максимальный допустимый угод наклона ЛА.
- HORIZON — тоже стабилизация, но предполагающая более агрессивное управление.
- AIRMODE — вспомогательный режим, пришедший из Betaflight.
- POSHOLD — удержание позиции по GPS.
- ALTHOLD — удержание высоты по барометру. Важный нюанс: «целевая» высота (которую квадрокоптер будет пытаться удерживать) запоминается при активации режима, а не при арминге. Кроме того, стик газа в этом режиме контролирует не газ, а вертикальную скорость с висением на 50% газа. Учитывая всё это, не стоит взлетать в этом режиме.
- MAG — удержание курса по компасу.
- HEAD LOCK — более жесткое удержание курса без использования компаса (актуально только для трикоптеров и, возможно, самолетов классической схемы).
В ранних версиях iNAV режимы удержания высоты и позиции не были самостоятельными и их надо было добавлять к ANGLE или HORIZON. Сейчас они самодостаточны, но, тем не менее, я всё же включу ANGLE и AIRMODE. Дело в том, что при первом полёте у меня не включился POSHOLD (как предположил Константин, была ошибка компаса) и я получил режим ACRO.
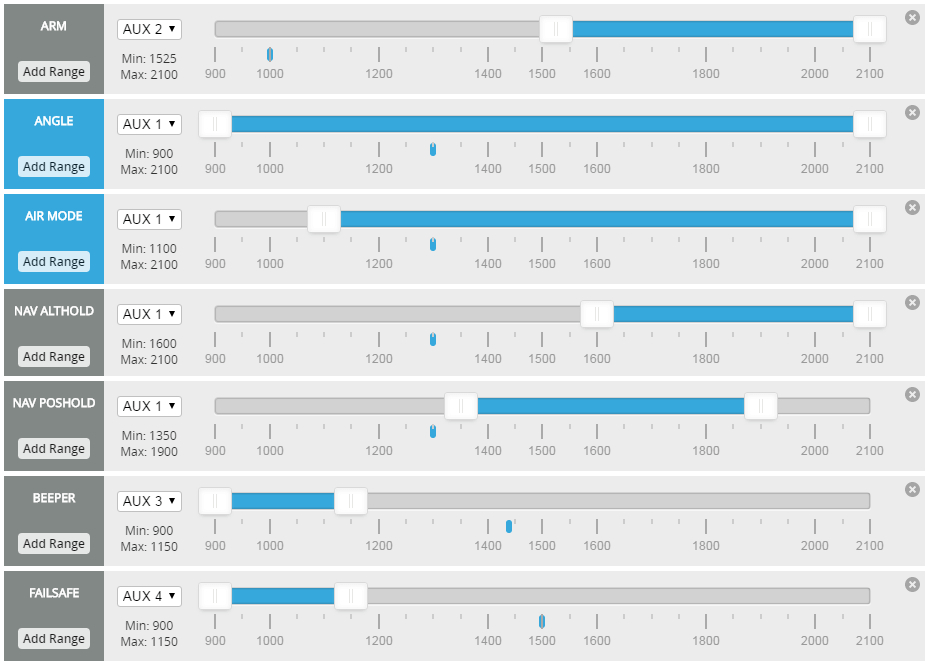
Переключателя режимов у меня два трёхпозиционных, но управляющих одним каналом (AUX1). Это даёт мне возможность настроить до пяти режимов или их комбинаций, чем я и воспользовался:
- ANGLE — для взлётов и посадок
- ANGLE + AIRMODE
- POSHOLD + ANGLE + AIRMODE
- POSHOLD + ALTHOLD + ANGLE + AIRMODE
- ALTHOLD + ANGLE + AIRMODE — основной полётный режим
Также я повесил на тумблеры арминг (AUX2) и пищалку (AUX3), а Failsafe на «безтумблерный» AUX4.
Пара слов о приоритетах режимов. Наивысший, разумеется, у Failsafe, далее идёт RTH, третим — WP, и затем уже режимы вроде POSHOLD и ALTHOLD. AIRMODE в отличии от Betaflight, здесь не имеет приоритета над MOTOR_STOP. То есть, если MOTOR_STOP включен, моторы в любом случае будут останавливаться при нулевом газе.
iNAV Configurator, вкладка Modes
Вкладка LED Strip
Тут всё очень субъективно. Для своего квадрика я настроил подсветку синего цвета с эффектом Larson Scanner.
Вкладка Sensors
Настраивать тут ничего не надо, но вот проверить работу датчиков можно. В первую очередь, барометра. Единственное, что надо знать — барометр начинает отображать данные только после арминга, а до этого высота принудительно подтягивается к нулю. Сделано для того, чтобы высота «дома» всегда нулевой.
Вкладка CLI
Несмотря на удобный конфигуратор, здесь тоже предстоит кое-что сделать. Для начала надо откалибровать каналы. Я уже писал как сделать это на передатчике, но, как оказалось, лучше делать это в прошивке ПК. Итак, сперва надо во вкладке Reciever посмотреть и запомнить крайние показатели всех четырёх каналов управления. Например, они такие:
roll 1050 - 1950
pitch 990 - 1992
yaw 990 - 2015
throttle 1070 - 1980
Затем нужно сообщить эти диапазоны прошивке. Делается это следующими командами:
rxrange 0 1050 1950
rxrange 1 990 1992
rxrange 2 990 2015
rxrange 3 1070 1980
Крайние точки теперь настроены, а вот центральные всё равно придётся настраивать на передатчике. Далее я ввёл некоторые настройки, адаптированные для маленьких рам. Их список находится здесь.
set p_pitch = 55
set i_pitch = 40
set d_pitch = 15
set p_roll = 55
set i_roll = 40
set d_roll = 15
set p_yaw = 90
set i_yaw = 45
set d_yaw = 20
set p_level = 20
set i_level = 15
set d_level = 75
set gyro_lpf = 256hz
set tpa_rate = 10
set tpa_breakpoint = 1650
set looptime = 1000
set gyro_sync = on
set gyro_sync_denom = 8
Опытным путём (то есть, в поле) надо определить газ висения и задать как значение переменной nav_mc_hover_thr. Оно будет использовано в режиме ALTHOLD. Если фактический газ висения будет отличается от заданного, то при активации режима удержания высоты, квадрокоптер будет сильно просаживатся или подпрыгивать.
Чтобы квадрокоптер армился в любом положении (даже вверх ногами), надо прописать:
set small_angle = 180
В iNAV много внимания уделено всевозможной защите. Выше уже упоминалась блокировка запуска моторов при неоткалиброванных датчиках. Кроме этого, есть переменные inav_gps_min_sats и nav_extra_arming_safety. Первая отвечает за минимальное количество спутников GPS, которые надо «поймать» для арминга, вторая разрешает/запрещает арминг при полном отсутствии сингала GPS. В процессе настройки, зачастую полезно отключить nav_extra_arming_safety, но потом надо не забыть включить обратно.
Ещё одна интересная переменная — nav_user_control_mode. Она отвечает за то, как будут интерпретироваться pitch/roll в режиме POSHOLD. Её значение по умолчанию ATTI — правый стик контролирует угол наклона коптера как в режиме ANGLE. Также возможен вариант CRUISE — правый стик контролирует скорость и направление полета. Я предпочитаю ATTI.
Собственно, всё, можно сохранять. Вот полный дамп моих настроек:
Dump всех настроек iNAV
# version # INAV/SPRACINGF3 1.5.0 Dec 31 2016 / 02:15:51 (37afad6) # pflags # Persistent config flags: 0x00000000 # dump master # mixer mixer QUADX mmix reset smix reset # feature feature -RX_PPM feature -VBAT feature -UNUSED_1 feature -RX_SERIAL feature -MOTOR_STOP feature -SERVO_TILT feature -SOFTSERIAL feature -GPS feature -FAILSAFE feature -SONAR feature -TELEMETRY feature -CURRENT_METER feature -3D feature -RX_PARALLEL_PWM feature -RX_MSP feature -RSSI_ADC feature -LED_STRIP feature -DASHBOARD feature -UNUSED_2 feature -BLACKBOX feature -CHANNEL_FORWARDING feature -TRANSPONDER feature -AIRMODE feature -SUPEREXPO feature -VTX feature -RX_SPI feature -SOFTSPI feature -PWM_SERVO_DRIVER feature -PWM_OUTPUT_ENABLE feature -OSD feature RX_PPM feature VBAT feature GPS feature FAILSAFE feature LED_STRIP feature PWM_OUTPUT_ENABLE # beeper beeper GYRO_CALIBRATED beeper HW_FAILURE beeper RX_LOST beeper RX_LOST_LANDING beeper DISARMING beeper ARMING beeper ARMING_GPS_FIX beeper BAT_CRIT_LOW beeper BAT_LOW beeper GPS_STATUS beeper RX_SET beeper ACC_CALIBRATION beeper ACC_CALIBRATION_FAIL beeper READY_BEEP beeper MULTI_BEEPS beeper DISARM_REPEAT beeper ARMED beeper SYSTEM_INIT beeper ON_USB beeper LAUNCH_MODE # map map AETR1234 # serial serial 0 1 115200 38400 0 115200 serial 1 2 115200 57600 0 115200 serial 2 1 115200 38400 0 115200 # led led 0 0,15::G:10 led 1 1,15::CO:10 led 2 2,15::CO:10 led 3 3,15::CO:10 led 4 4,15::CO:10 led 5 5,15::CO:10 led 6 6,15::CO:10 led 7 7,15::CO:10 led 8 8,15::CO:10 led 9 9,15::CO:10 led 10 10,15::CO:10 led 11 11,15::CO:10 led 12 12,15::CO:10 led 13 13,15::CO:10 led 14 14,15::CO:10 led 15 15,15::G:10 led 16 0,0::C:0 led 17 0,0::C:0 led 18 0,0::C:0 led 19 0,0::C:0 led 20 0,0::C:0 led 21 0,0::C:0 led 22 0,0::C:0 led 23 0,0::C:0 led 24 0,0::C:0 led 25 0,0::C:0 led 26 0,0::C:0 led 27 0,0::C:0 led 28 0,0::C:0 led 29 0,0::C:0 led 30 0,0::C:0 led 31 0,0::C:0 # color color 0 0,0,0 color 1 0,255,255 color 2 0,0,255 color 3 30,0,255 color 4 60,0,255 color 5 90,0,255 color 6 120,0,255 color 7 150,0,255 color 8 180,0,255 color 9 210,0,255 color 10 240,0,255 color 11 270,0,255 color 12 300,0,255 color 13 330,0,255 color 14 0,0,0 color 15 0,0,0 # mode_color mode_color 0 0 1 mode_color 0 1 11 mode_color 0 2 2 mode_color 0 3 13 mode_color 0 4 10 mode_color 0 5 3 mode_color 1 0 5 mode_color 1 1 11 mode_color 1 2 3 mode_color 1 3 13 mode_color 1 4 10 mode_color 1 5 3 mode_color 2 0 10 mode_color 2 1 11 mode_color 2 2 4 mode_color 2 3 13 mode_color 2 4 10 mode_color 2 5 3 mode_color 3 0 8 mode_color 3 1 11 mode_color 3 2 4 mode_color 3 3 13 mode_color 3 4 10 mode_color 3 5 3 mode_color 4 0 7 mode_color 4 1 11 mode_color 4 2 3 mode_color 4 3 13 mode_color 4 4 10 mode_color 4 5 3 mode_color 5 0 9 mode_color 5 1 11 mode_color 5 2 2 mode_color 5 3 13 mode_color 5 4 10 mode_color 5 5 3 mode_color 6 0 6 mode_color 6 1 10 mode_color 6 2 1 mode_color 6 3 0 mode_color 6 4 0 mode_color 6 5 2 mode_color 6 6 3 mode_color 6 7 6 mode_color 6 8 0 mode_color 6 9 0 mode_color 6 10 0 set looptime = 1000 set i2c_overclock = OFF set gyro_sync = ON set gyro_sync_denom = 8 set acc_task_frequency = 500 set attitude_task_frequency = 250 set async_mode = NONE set mid_rc = 1500 set min_check = 1100 set max_check = 1900 set rssi_channel = 0 set rssi_scale = 30 set rssi_ppm_invert = OFF set rc_smoothing = ON set input_filtering_mode = OFF set min_throttle = 1050 set max_throttle = 1850 set min_command = 1000 set 3d_deadband_low = 1406 set 3d_deadband_high = 1514 set 3d_neutral = 1460 set 3d_deadband_throttle = 1000 set motor_pwm_rate = 1000 set motor_pwm_protocol = ONESHOT125 set fixed_wing_auto_arm = OFF set disarm_kill_switch = ON set auto_disarm_delay = 5 set small_angle = 180 set reboot_character = 82 set gps_provider = UBLOX set gps_sbas_mode = NONE set gps_dyn_model = AIR_1G set gps_auto_config = ON set gps_auto_baud = ON set inav_auto_mag_decl = ON set inav_accz_unarmedcal = ON set inav_use_gps_velned = ON set inav_gps_delay = 200 set inav_gps_min_sats = 6 set inav_w_z_baro_p = 0.350 set inav_w_z_gps_p = 0.200 set inav_w_z_gps_v = 0.500 set inav_w_xy_gps_p = 1.000 set inav_w_xy_gps_v = 2.000 set inav_w_z_res_v = 0.500 set inav_w_xy_res_v = 0.500 set inav_w_acc_bias = 0.010 set inav_max_eph_epv = 1000.000 set inav_baro_epv = 100.000 set nav_disarm_on_landing = OFF set nav_use_midthr_for_althold = OFF set nav_extra_arming_safety = ON set nav_user_control_mode = ATTI set nav_position_timeout = 5 set nav_wp_radius = 100 set nav_max_speed = 300 set nav_max_climb_rate = 500 set nav_manual_speed = 500 set nav_manual_climb_rate = 200 set nav_landing_speed = 200 set nav_land_slowdown_minalt = 500 set nav_land_slowdown_maxalt = 2000 set nav_emerg_landing_speed = 500 set nav_min_rth_distance = 500 set nav_rth_climb_first = ON set nav_rth_tail_first = OFF set nav_rth_alt_mode = AT_LEAST set nav_rth_altitude = 1000 set nav_mc_bank_angle = 30 set nav_mc_hover_thr = 1350 set nav_mc_auto_disarm_delay = 2000 set nav_fw_cruise_thr = 1400 set nav_fw_min_thr = 1200 set nav_fw_max_thr = 1700 set nav_fw_bank_angle = 20 set nav_fw_climb_angle = 20 set nav_fw_dive_angle = 15 set nav_fw_pitch2thr = 10 set nav_fw_roll2pitch = 75 set nav_fw_loiter_radius = 5000 set nav_fw_launch_velocity = 300 set nav_fw_launch_accel = 1863 set nav_fw_launch_detect_time = 40 set nav_fw_launch_thr = 1700 set nav_fw_launch_motor_delay = 500 set nav_fw_launch_timeout = 5000 set nav_fw_launch_climb_angle = 10 set serialrx_provider = SPEK1024 set spektrum_sat_bind = 0 set telemetry_switch = OFF set telemetry_inversion = ON set frsky_default_lattitude = 0.000 set frsky_default_longitude = 0.000 set frsky_coordinates_format = 0 set frsky_unit = IMPERIAL set frsky_vfas_precision = 0 set frsky_vfas_cell_voltage = OFF set hott_alarm_sound_interval = 5 set smartport_uart_unidir = OFF set battery_capacity = 0 set vbat_scale = 110 set vbat_max_cell_voltage = 43 set vbat_min_cell_voltage = 33 set vbat_warning_cell_voltage = 35 set current_meter_scale = 400 set current_meter_offset = 0 set multiwii_current_meter_output = OFF set current_meter_type = ADC set align_gyro = DEFAULT set align_acc = DEFAULT set align_mag = DEFAULT set align_board_roll = 0 set align_board_pitch = 0 set align_board_yaw = 900 set gyro_lpf = 256HZ set moron_threshold = 32 set imu_dcm_kp = 2500 set imu_dcm_ki = 50 set imu_dcm_kp_mag = 10000 set imu_dcm_ki_mag = 0 set pos_hold_deadband = 20 set alt_hold_deadband = 50 set yaw_motor_direction = 1 set yaw_jump_prevention_limit = 200 set tri_unarmed_servo = ON set servo_lowpass_freq = 400 set servo_lowpass_enable = OFF set servo_center_pulse = 1500 set servo_pwm_rate = 50 set failsafe_delay = 10 set failsafe_recovery_delay = 117 set failsafe_off_delay = 200 set failsafe_throttle = 1000 set failsafe_kill_switch = OFF set failsafe_throttle_low_delay = 10 set failsafe_procedure = RTH set rx_min_usec = 885 set rx_max_usec = 2115 set acc_hardware = MPU6050 set baro_use_median_filter = ON set baro_hardware = MS5611 set mag_hardware = HMC5883 set blackbox_rate_num = 1 set blackbox_rate_denom = 4 set blackbox_device = SPIFLASH set magzero_x = 65 set magzero_y = 38 set magzero_z = -81 set acczero_x = 124 set acczero_y = 6 set acczero_z = -170 set ledstrip_visual_beeper = OFF set accgain_x = 4055 set accgain_y = 4059 set accgain_z = 4007 # rxfail rxfail 0 a rxfail 1 a rxfail 2 a rxfail 3 h rxfail 4 h rxfail 5 h rxfail 6 h rxfail 7 h rxfail 8 h rxfail 9 h rxfail 10 h rxfail 11 h rxfail 12 h rxfail 13 h rxfail 14 h rxfail 15 h rxfail 16 h rxfail 17 h # dump profile # profile profile 0 # aux aux 0 0 1 1550 2100 aux 1 1 0 900 2100 aux 2 20 0 1100 2100 aux 3 3 0 1900 2100 aux 4 9 0 1300 2100 aux 5 11 2 900 1150 aux 6 18 3 900 1150 aux 7 0 0 900 900 aux 8 0 0 900 900 aux 9 0 0 900 900 aux 10 0 0 900 900 aux 11 0 0 900 900 aux 12 0 0 900 900 aux 13 0 0 900 900 aux 14 0 0 900 900 aux 15 0 0 900 900 aux 16 0 0 900 900 aux 17 0 0 900 900 aux 18 0 0 900 900 aux 19 0 0 900 900 # adjrange adjrange 0 0 0 900 900 0 0 adjrange 1 0 0 900 900 0 0 adjrange 2 0 0 900 900 0 0 adjrange 3 0 0 900 900 0 0 adjrange 4 0 0 900 900 0 0 adjrange 5 0 0 900 900 0 0 adjrange 6 0 0 900 900 0 0 adjrange 7 0 0 900 900 0 0 adjrange 8 0 0 900 900 0 0 adjrange 9 0 0 900 900 0 0 adjrange 10 0 0 900 900 0 0 adjrange 11 0 0 900 900 0 0 # rxrange rxrange 0 1000 2000 rxrange 1 1000 2000 rxrange 2 1000 2000 rxrange 3 1023 2000 # servo servo 0 1000 2000 1500 90 90 100 -1 servo 1 1000 2000 1500 90 90 100 -1 servo 2 1000 2000 1500 90 90 100 -1 servo 3 1000 2000 1500 90 90 100 -1 servo 4 1000 2000 1500 90 90 100 -1 servo 5 1000 2000 1500 90 90 100 -1 servo 6 1000 2000 1500 90 90 100 -1 servo 7 1000 2000 1500 90 90 100 -1 set nav_alt_p = 50 set nav_alt_i = 0 set nav_alt_d = 0 set nav_vel_p = 100 set nav_vel_i = 50 set nav_vel_d = 10 set nav_pos_p = 65 set nav_pos_i = 120 set nav_pos_d = 10 set nav_posr_p = 180 set nav_posr_i = 15 set nav_posr_d = 100 set nav_navr_p = 10 set nav_navr_i = 5 set nav_navr_d = 8 set deadband = 5 set yaw_deadband = 5 set throttle_tilt_comp_str = 0 set flaperon_throw_offset = 250 set flaperon_throw_inverted = OFF set gimbal_mode = NORMAL set fw_iterm_throw_limit = 165 set mode_range_logic_operator = OR set default_rate_profile = 0 set mag_declination = 830 set mag_hold_rate_limit = 90 set p_pitch = 55 set i_pitch = 40 set d_pitch = 15 set p_roll = 55 set i_roll = 40 set d_roll = 15 set p_yaw = 90 set i_yaw = 45 set d_yaw = 20 set p_level = 20 set i_level = 15 set d_level = 75 set max_angle_inclination_rll = 300 set max_angle_inclination_pit = 300 set gyro_soft_lpf_hz = 60 set acc_soft_lpf_hz = 15 set dterm_lpf_hz = 40 set yaw_lpf_hz = 30 set yaw_p_limit = 300 set iterm_ignore_threshold = 200 set yaw_iterm_ignore_threshold = 50 set rate_accel_limit_roll_pitch = 0 set rate_accel_limit_yaw = 10000 # dump rates # rateprofile rateprofile 0 set rc_expo = 70 set rc_yaw_expo = 20 set thr_mid = 50 set thr_expo = 0 set roll_rate = 20 set pitch_rate = 20 set yaw_rate = 20 set tpa_rate = 10 set tpa_breakpoint = 1650
- Часть 1 — комплектующие
- Часть 2 — сборка
- Часть 3 — пересборка на SPRacingF3
- Часть 5 — выдержки из бортового журнала
- Фотогалерея

05 февраля 2023
Обновляем iNav
Привет бро! Щас покажу как обновить iNav и сохранить все настройки.
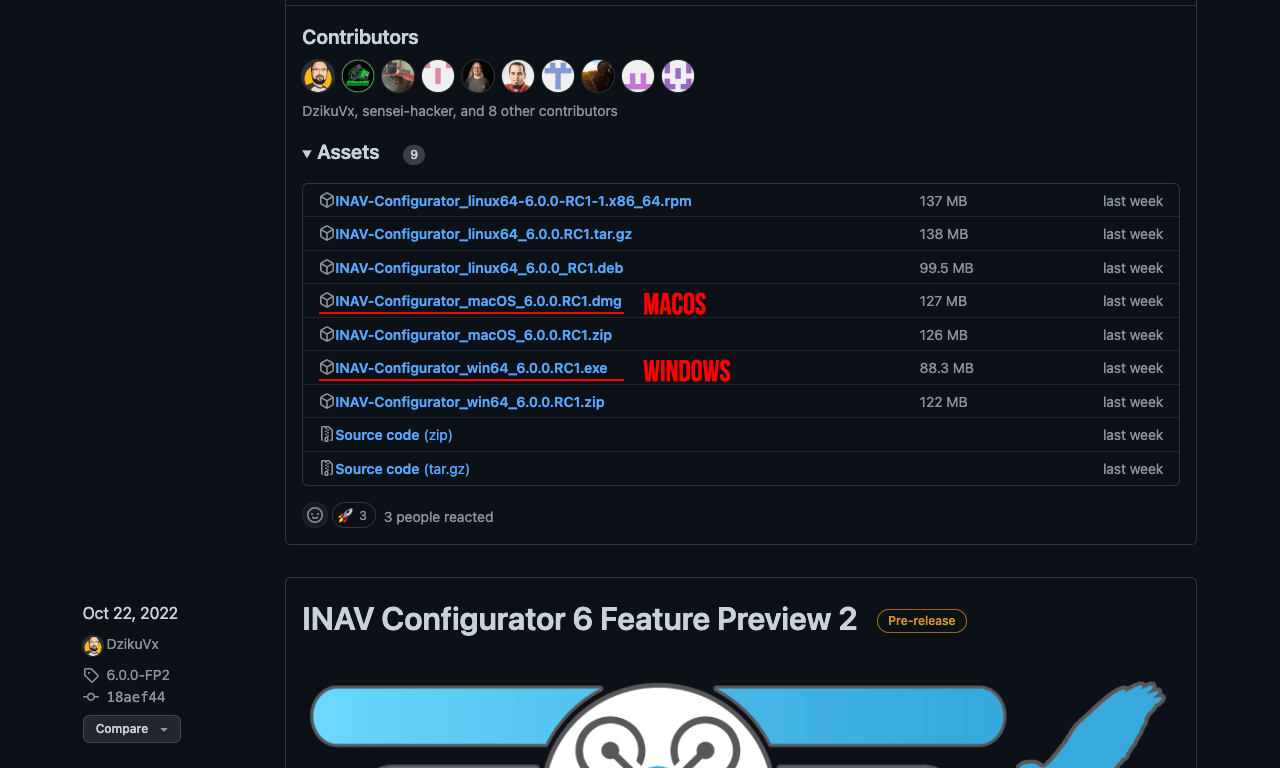
Конфигуратор
Для начала надо скачать крайний версию конфигуратора. Перейди по ссылки и спустить вниз до раздела «Assets», раскрой его и скачай подходящую твоей системе версию. Далее установи и запусти iNav.
Сохранение настроек
Если хочешь можешь пройтись по всем вкладкам и сделать принтскрин каждой. А после восстановление настроек пройтись и посмотреть как было и как стало. Но я бы не заморачивался так как все настройки которые ты менял показывает команда diff.
У тебя может сразу не сработать команда «save», по этому введи его вручную и нажми «Enter». После чего политик перезагрузится с твоими настройками.
Да и в новом конфигураторе появилась полная поддержка WTFOS. Надо перейти на вкладку «OSD» и в блоке «Video Format» установить «DJIWTF» после чего заново расставить элементы на экране.
На этом все. Чистого неба! Увидимся!!!

Новые посты в моем Телеграмм канале