I’d like Python to be a Tiny Basic compiler. Assignment and addition and subtraction, IF and for.
Grammatical Analysis Python has a PLY package, making a calculator with Ply.LEX and PLY.YACC is simple, I have done it.
It is not difficult to do an interpreter. However, the interpreter and the compiler are also differential code generation. When I read the book, I used Python’s DIS package to see the «assembly» form of BYTECODE, even Monk guess, it should be done, but don’t know how difficult?
A = B + C + D; the interpreter encounters C + D to evaluate and put the result in the stack or somewhere. Compiler? See c and d push, encounter + add stack top and subtittable top, POP PUSH? How to assign registers?
Make a register name stack, the stack has overflows? When compiling, OR (Out of Register) errors, the expression is complex, please add a temporary variable yourself, haha.
Use assembly to steal a lazy: assembler supports JMP Label. Don’t have to jump to where you want to jump.
The assembler originally wants to use NASM, but it doesn’t take Linker. Link.exe? Don’t want the next big package.
Go Tools for Windows (assembler, resource compiler, linker, debugger and information) (godevtool.com)
There are many examples. This can be generated in an imaginary sample, but still Windows, not DOS.
D:asm>goasm 1.asm
GoAsm.Exe Version 0.61.0.1 — Copyright Jeremy Gordon 2001-2017 — [email protected]
Output file: 1.obj
D:asm>golink /console 1.obj kernel32.dll
GoLink.Exe Version 1.0.3.1 Copyright Jeremy Gordon 2002-2020 [email protected]
Output file: 1.exe
Format: Win32 Size: 2,048 bytes
D:asm>1
Hello World (from GoAsm)
DATA SECTION ; RCKEEP DD 0 ;temporary place to keep things ; CODE SECTION ; START: PUSH -11D ;STD_OUTPUT_HANDLE CALL GetStdHandle ;get, in eax, handle to active screen buffer PUSH 0,ADDR RCKEEP ;RCKEEP receives output from API PUSH 24D,'Hello World (from GoAsm)' ;24=length of string PUSH EAX ;handle to active screen buffer CALL WriteFile XOR EAX,EAX ;return zero RET
It seems that Return 0 (XOR EAX, EAX) is in line with INT 21. I don’t have to learn to call Writefile (GetStdhandle), and the number is left in the register, not Print, generated .exe in the debugger (there is or even IDE in Go Tools, even IDE).
D:asm>copy con 1.py
quit(13)^Z
1 file has been copied.
D:asm>1.py
D:asm>echo %ERRORLEVEL%
13
I am really too mating, the debugger is not available. Try Mov Eax, 257:
D:asm>echo %ERRORLEVEL%
257
D:asm>echo %ErrorLevelL%
%ErrorLevelL%
D:asm>echo %errorlevel%
257
I didn’t plan to count> 100. If x op y tell, there is AND ? Not, OR is also available. > = <= Still have it.
A Quick Guide to Go’s Assembler
This document is a quick outline of the unusual form of assembly language used by the gc Go compiler.
The document is not comprehensive.
The assembler is based on the input style of the Plan 9 assemblers, which is documented in detail
elsewhere.
If you plan to write assembly language, you should read that document although much of it is Plan 9-specific.
The current document provides a summary of the syntax and the differences with
what is explained in that document, and
describes the peculiarities that apply when writing assembly code to interact with Go.
The most important thing to know about Go’s assembler is that it is not a direct representation of the underlying machine.
Some of the details map precisely to the machine, but some do not.
This is because the compiler suite (see
this description)
needs no assembler pass in the usual pipeline.
Instead, the compiler operates on a kind of semi-abstract instruction set,
and instruction selection occurs partly after code generation.
The assembler works on the semi-abstract form, so
when you see an instruction like MOV
what the toolchain actually generates for that operation might
not be a move instruction at all, perhaps a clear or load.
Or it might correspond exactly to the machine instruction with that name.
In general, machine-specific operations tend to appear as themselves, while more general concepts like
memory move and subroutine call and return are more abstract.
The details vary with architecture, and we apologize for the imprecision; the situation is not well-defined.
The assembler program is a way to parse a description of that
semi-abstract instruction set and turn it into instructions to be
input to the linker.
If you want to see what the instructions look like in assembly for a given architecture, say amd64, there
are many examples in the sources of the standard library, in packages such as
runtime and
math/big.
You can also examine what the compiler emits as assembly code
(the actual output may differ from what you see here):
$ cat x.go
package main
func main() {
println(3)
}
$ GOOS=linux GOARCH=amd64 go tool compile -S x.go # or: go build -gcflags -S x.go
"".main STEXT size=74 args=0x0 locals=0x10
0x0000 00000 (x.go:3) TEXT "".main(SB), $16-0
0x0000 00000 (x.go:3) MOVQ (TLS), CX
0x0009 00009 (x.go:3) CMPQ SP, 16(CX)
0x000d 00013 (x.go:3) JLS 67
0x000f 00015 (x.go:3) SUBQ $16, SP
0x0013 00019 (x.go:3) MOVQ BP, 8(SP)
0x0018 00024 (x.go:3) LEAQ 8(SP), BP
0x001d 00029 (x.go:3) FUNCDATA $0, gclocals·33cdeccccebe80329f1fdbee7f5874cb(SB)
0x001d 00029 (x.go:3) FUNCDATA $1, gclocals·33cdeccccebe80329f1fdbee7f5874cb(SB)
0x001d 00029 (x.go:3) FUNCDATA $2, gclocals·33cdeccccebe80329f1fdbee7f5874cb(SB)
0x001d 00029 (x.go:4) PCDATA $0, $0
0x001d 00029 (x.go:4) PCDATA $1, $0
0x001d 00029 (x.go:4) CALL runtime.printlock(SB)
0x0022 00034 (x.go:4) MOVQ $3, (SP)
0x002a 00042 (x.go:4) CALL runtime.printint(SB)
0x002f 00047 (x.go:4) CALL runtime.printnl(SB)
0x0034 00052 (x.go:4) CALL runtime.printunlock(SB)
0x0039 00057 (x.go:5) MOVQ 8(SP), BP
0x003e 00062 (x.go:5) ADDQ $16, SP
0x0042 00066 (x.go:5) RET
0x0043 00067 (x.go:5) NOP
0x0043 00067 (x.go:3) PCDATA $1, $-1
0x0043 00067 (x.go:3) PCDATA $0, $-1
0x0043 00067 (x.go:3) CALL runtime.morestack_noctxt(SB)
0x0048 00072 (x.go:3) JMP 0
...
The FUNCDATA and PCDATA directives contain information
for use by the garbage collector; they are introduced by the compiler.
To see what gets put in the binary after linking, use go tool objdump:
$ go build -o x.exe x.go $ go tool objdump -s main.main x.exe TEXT main.main(SB) /tmp/x.go x.go:3 0x10501c0 65488b0c2530000000 MOVQ GS:0x30, CX x.go:3 0x10501c9 483b6110 CMPQ 0x10(CX), SP x.go:3 0x10501cd 7634 JBE 0x1050203 x.go:3 0x10501cf 4883ec10 SUBQ $0x10, SP x.go:3 0x10501d3 48896c2408 MOVQ BP, 0x8(SP) x.go:3 0x10501d8 488d6c2408 LEAQ 0x8(SP), BP x.go:4 0x10501dd e86e45fdff CALL runtime.printlock(SB) x.go:4 0x10501e2 48c7042403000000 MOVQ $0x3, 0(SP) x.go:4 0x10501ea e8e14cfdff CALL runtime.printint(SB) x.go:4 0x10501ef e8ec47fdff CALL runtime.printnl(SB) x.go:4 0x10501f4 e8d745fdff CALL runtime.printunlock(SB) x.go:5 0x10501f9 488b6c2408 MOVQ 0x8(SP), BP x.go:5 0x10501fe 4883c410 ADDQ $0x10, SP x.go:5 0x1050202 c3 RET x.go:3 0x1050203 e83882ffff CALL runtime.morestack_noctxt(SB) x.go:3 0x1050208 ebb6 JMP main.main(SB)
Constants
Although the assembler takes its guidance from the Plan 9 assemblers,
it is a distinct program, so there are some differences.
One is in constant evaluation.
Constant expressions in the assembler are parsed using Go’s operator
precedence, not the C-like precedence of the original.
Thus 3&1<<2 is 4, not 0—it parses as (3&1)<<2
not 3&(1<<2).
Also, constants are always evaluated as 64-bit unsigned integers.
Thus -2 is not the integer value minus two,
but the unsigned 64-bit integer with the same bit pattern.
The distinction rarely matters but
to avoid ambiguity, division or right shift where the right operand’s
high bit is set is rejected.
Symbols
Some symbols, such as R1 or LR,
are predefined and refer to registers.
The exact set depends on the architecture.
There are four predeclared symbols that refer to pseudo-registers.
These are not real registers, but rather virtual registers maintained by
the toolchain, such as a frame pointer.
The set of pseudo-registers is the same for all architectures:
-
FP: Frame pointer: arguments and locals. -
PC: Program counter:
jumps and branches. -
SB: Static base pointer: global symbols. -
SP: Stack pointer: the highest address within the local stack frame.
All user-defined symbols are written as offsets to the pseudo-registers
FP (arguments and locals) and SB (globals).
The SB pseudo-register can be thought of as the origin of memory, so the symbol foo(SB)
is the name foo as an address in memory.
This form is used to name global functions and data.
Adding <> to the name, as in foo<>(SB), makes the name
visible only in the current source file, like a top-level static declaration in a C file.
Adding an offset to the name refers to that offset from the symbol’s address, so
foo+4(SB) is four bytes past the start of foo.
The FP pseudo-register is a virtual frame pointer
used to refer to function arguments.
The compilers maintain a virtual frame pointer and refer to the arguments on the stack as offsets from that pseudo-register.
Thus 0(FP) is the first argument to the function,
8(FP) is the second (on a 64-bit machine), and so on.
However, when referring to a function argument this way, it is necessary to place a name
at the beginning, as in first_arg+0(FP) and second_arg+8(FP).
(The meaning of the offset—offset from the frame pointer—distinct
from its use with SB, where it is an offset from the symbol.)
The assembler enforces this convention, rejecting plain 0(FP) and 8(FP).
The actual name is semantically irrelevant but should be used to document
the argument’s name.
It is worth stressing that FP is always a
pseudo-register, not a hardware
register, even on architectures with a hardware frame pointer.
For assembly functions with Go prototypes, go vet will check that the argument names
and offsets match.
On 32-bit systems, the low and high 32 bits of a 64-bit value are distinguished by adding
a _lo or _hi suffix to the name, as in arg_lo+0(FP) or arg_hi+4(FP).
If a Go prototype does not name its result, the expected assembly name is ret.
The SP pseudo-register is a virtual stack pointer
used to refer to frame-local variables and the arguments being
prepared for function calls.
It points to the highest address within the local stack frame, so references should use negative offsets
in the range [−framesize, 0):
x-8(SP), y-4(SP), and so on.
On architectures with a hardware register named SP,
the name prefix distinguishes
references to the virtual stack pointer from references to the architectural
SP register.
That is, x-8(SP) and -8(SP)
are different memory locations:
the first refers to the virtual stack pointer pseudo-register,
while the second refers to the
hardware’s SP register.
On machines where SP and PC are
traditionally aliases for a physical, numbered register,
in the Go assembler the names SP and PC
are still treated specially;
for instance, references to SP require a symbol,
much like FP.
To access the actual hardware register use the true R name.
For example, on the ARM architecture the hardware
SP and PC are accessible as
R13 and R15.
Branches and direct jumps are always written as offsets to the PC, or as
jumps to labels:
label: MOVW $0, R1 JMP label
Each label is visible only within the function in which it is defined.
It is therefore permitted for multiple functions in a file to define
and use the same label names.
Direct jumps and call instructions can target text symbols,
such as name(SB), but not offsets from symbols,
such as name+4(SB).
Instructions, registers, and assembler directives are always in UPPER CASE to remind you
that assembly programming is a fraught endeavor.
(Exception: the g register renaming on ARM.)
In Go object files and binaries, the full name of a symbol is the
package path followed by a period and the symbol name:
fmt.Printf or math/rand.Int.
Because the assembler’s parser treats period and slash as punctuation,
those strings cannot be used directly as identifier names.
Instead, the assembler allows the middle dot character U+00B7
and the division slash U+2215 in identifiers and rewrites them to
plain period and slash.
Within an assembler source file, the symbols above are written as
fmt·Printf and math∕rand·Int.
The assembly listings generated by the compilers when using the -S flag
show the period and slash directly instead of the Unicode replacements
required by the assemblers.
Most hand-written assembly files do not include the full package path
in symbol names, because the linker inserts the package path of the current
object file at the beginning of any name starting with a period:
in an assembly source file within the math/rand package implementation,
the package’s Int function can be referred to as ·Int.
This convention avoids the need to hard-code a package’s import path in its
own source code, making it easier to move the code from one location to another.
Directives
The assembler uses various directives to bind text and data to symbol names.
For example, here is a simple complete function definition. The TEXT
directive declares the symbol runtime·profileloop and the instructions
that follow form the body of the function.
The last instruction in a TEXT block must be some sort of jump, usually a RET (pseudo-)instruction.
(If it’s not, the linker will append a jump-to-itself instruction; there is no fallthrough in TEXTs.)
After the symbol, the arguments are flags (see below)
and the frame size, a constant (but see below):
TEXT runtime·profileloop(SB),NOSPLIT,$8 MOVQ $runtime·profileloop1(SB), CX MOVQ CX, 0(SP) CALL runtime·externalthreadhandler(SB) RET
In the general case, the frame size is followed by an argument size, separated by a minus sign.
(It’s not a subtraction, just idiosyncratic syntax.)
The frame size $24-8 states that the function has a 24-byte frame
and is called with 8 bytes of argument, which live on the caller’s frame.
If NOSPLIT is not specified for the TEXT,
the argument size must be provided.
For assembly functions with Go prototypes, go vet will check that the
argument size is correct.
Note that the symbol name uses a middle dot to separate the components and is specified as an offset from the
static base pseudo-register SB.
This function would be called from Go source for package runtime using the
simple name profileloop.
Global data symbols are defined by a sequence of initializing
DATA directives followed by a GLOBL directive.
Each DATA directive initializes a section of the
corresponding memory.
The memory not explicitly initialized is zeroed.
The general form of the DATA directive is
DATA symbol+offset(SB)/width, value
which initializes the symbol memory at the given offset and width with the given value.
The DATA directives for a given symbol must be written with increasing offsets.
The GLOBL directive declares a symbol to be global.
The arguments are optional flags and the size of the data being declared as a global,
which will have initial value all zeros unless a DATA directive
has initialized it.
The GLOBL directive must follow any corresponding DATA directives.
For example,
DATA divtab<>+0x00(SB)/4, $0xf4f8fcff DATA divtab<>+0x04(SB)/4, $0xe6eaedf0 ... DATA divtab<>+0x3c(SB)/4, $0x81828384 GLOBL divtab<>(SB), RODATA, $64 GLOBL runtime·tlsoffset(SB), NOPTR, $4
declares and initializes divtab<>, a read-only 64-byte table of 4-byte integer values,
and declares runtime·tlsoffset, a 4-byte, implicitly zeroed variable that
contains no pointers.
There may be one or two arguments to the directives.
If there are two, the first is a bit mask of flags,
which can be written as numeric expressions, added or or-ed together,
or can be set symbolically for easier absorption by a human.
Their values, defined in the standard #include file textflag.h, are:
-
NOPROF= 1
(ForTEXTitems.)
Don’t profile the marked function. This flag is deprecated. -
DUPOK= 2
It is legal to have multiple instances of this symbol in a single binary.
The linker will choose one of the duplicates to use. -
NOSPLIT= 4
(ForTEXTitems.)
Don’t insert the preamble to check if the stack must be split.
The frame for the routine, plus anything it calls, must fit in the
spare space remaining in the current stack segment.
Used to protect routines such as the stack splitting code itself. -
RODATA= 8
(ForDATAandGLOBLitems.)
Put this data in a read-only section. -
NOPTR= 16
(ForDATAandGLOBLitems.)
This data contains no pointers and therefore does not need to be
scanned by the garbage collector. -
WRAPPER= 32
(ForTEXTitems.)
This is a wrapper function and should not count as disablingrecover. -
NEEDCTXT= 64
(ForTEXTitems.)
This function is a closure so it uses its incoming context register. -
LOCAL= 128
This symbol is local to the dynamic shared object. -
TLSBSS= 256
(ForDATAandGLOBLitems.)
Put this data in thread local storage. -
NOFRAME= 512
(ForTEXTitems.)
Do not insert instructions to allocate a stack frame and save/restore the return
address, even if this is not a leaf function.
Only valid on functions that declare a frame size of 0. -
TOPFRAME= 2048
(ForTEXTitems.)
Function is the outermost frame of the call stack. Traceback should stop at this function.
Interacting with Go types and constants
If a package has any .s files, then go build will direct
the compiler to emit a special header called go_asm.h,
which the .s files can then #include.
The file contains symbolic #define constants for the
offsets of Go struct fields, the sizes of Go struct types, and most
Go const declarations defined in the current package.
Go assembly should avoid making assumptions about the layout of Go
types and instead use these constants.
This improves the readability of assembly code, and keeps it robust to
changes in data layout either in the Go type definitions or in the
layout rules used by the Go compiler.
Constants are of the form const_name.
For example, given the Go declaration const bufSize =, assembly code can refer to the value of this constant
1024
as const_bufSize.
Field offsets are of the form type_field.
Struct sizes are of the form type__size.
For example, consider the following Go definition:
type reader struct {
buf [bufSize]byte
r int
}
Assembly can refer to the size of this struct
as reader__size and the offsets of the two fields
as reader_buf and reader_r.
Hence, if register R1 contains a pointer to
a reader, assembly can reference the r field
as reader_r(R1).
If any of these #define names are ambiguous (for example,
a struct with a _size field), #include will fail with a «redefinition of macro» error.
"go_asm.h"
Runtime Coordination
For garbage collection to run correctly, the runtime must know the
location of pointers in all global data and in most stack frames.
The Go compiler emits this information when compiling Go source files,
but assembly programs must define it explicitly.
A data symbol marked with the NOPTR flag (see above)
is treated as containing no pointers to runtime-allocated data.
A data symbol with the RODATA flag
is allocated in read-only memory and is therefore treated
as implicitly marked NOPTR.
A data symbol with a total size smaller than a pointer
is also treated as implicitly marked NOPTR.
It is not possible to define a symbol containing pointers in an assembly source file;
such a symbol must be defined in a Go source file instead.
Assembly source can still refer to the symbol by name
even without DATA and GLOBL directives.
A good general rule of thumb is to define all non-RODATA
symbols in Go instead of in assembly.
Each function also needs annotations giving the location of
live pointers in its arguments, results, and local stack frame.
For an assembly function with no pointer results and
either no local stack frame or no function calls,
the only requirement is to define a Go prototype for the function
in a Go source file in the same package. The name of the assembly
function must not contain the package name component (for example,
function Syscall in package syscall should
use the name ·Syscall instead of the equivalent name
syscall·Syscall in its TEXT directive).
For more complex situations, explicit annotation is needed.
These annotations use pseudo-instructions defined in the standard
#include file funcdata.h.
If a function has no arguments and no results,
the pointer information can be omitted.
This is indicated by an argument size annotation of $n-0
on the TEXT instruction.
Otherwise, pointer information must be provided by
a Go prototype for the function in a Go source file,
even for assembly functions not called directly from Go.
(The prototype will also let go vet check the argument references.)
At the start of the function, the arguments are assumed
to be initialized but the results are assumed uninitialized.
If the results will hold live pointers during a call instruction,
the function should start by zeroing the results and then
executing the pseudo-instruction GO_RESULTS_INITIALIZED.
This instruction records that the results are now initialized
and should be scanned during stack movement and garbage collection.
It is typically easier to arrange that assembly functions do not
return pointers or do not contain call instructions;
no assembly functions in the standard library use
GO_RESULTS_INITIALIZED.
If a function has no local stack frame,
the pointer information can be omitted.
This is indicated by a local frame size annotation of $0-n
on the TEXT instruction.
The pointer information can also be omitted if the
function contains no call instructions.
Otherwise, the local stack frame must not contain pointers,
and the assembly must confirm this fact by executing the
pseudo-instruction NO_LOCAL_POINTERS.
Because stack resizing is implemented by moving the stack,
the stack pointer may change during any function call:
even pointers to stack data must not be kept in local variables.
Assembly functions should always be given Go prototypes,
both to provide pointer information for the arguments and results
and to let go vet check that
the offsets being used to access them are correct.
Architecture-specific details
It is impractical to list all the instructions and other details for each machine.
To see what instructions are defined for a given machine, say ARM,
look in the source for the obj support library for
that architecture, located in the directory src/cmd/internal/obj/arm.
In that directory is a file a.out.go; it contains
a long list of constants starting with A, like this:
const ( AAND = obj.ABaseARM + obj.A_ARCHSPECIFIC + iota AEOR ASUB ARSB AADD ...
This is the list of instructions and their spellings as known to the assembler and linker for that architecture.
Each instruction begins with an initial capital A in this list, so AAND
represents the bitwise and instruction,
AND (without the leading A),
and is written in assembly source as AND.
The enumeration is mostly in alphabetical order.
(The architecture-independent AXXX, defined in the
cmd/internal/obj package,
represents an invalid instruction).
The sequence of the A names has nothing to do with the actual
encoding of the machine instructions.
The cmd/internal/obj package takes care of that detail.
The instructions for both the 386 and AMD64 architectures are listed in
cmd/internal/obj/x86/a.out.go.
The architectures share syntax for common addressing modes such as
(R1) (register indirect),
4(R1) (register indirect with offset), and
$foo(SB) (absolute address).
The assembler also supports some (not necessarily all) addressing modes
specific to each architecture.
The sections below list these.
One detail evident in the examples from the previous sections is that data in the instructions flows from left to right:
MOVQ $0, CX clears CX.
This rule applies even on architectures where the conventional notation uses the opposite direction.
Here follow some descriptions of key Go-specific details for the supported architectures.
32-bit Intel 386
The runtime pointer to the g structure is maintained
through the value of an otherwise unused (as far as Go is concerned) register in the MMU.
In the runtime package, assembly code can include go_tls.h, which defines
an OS- and architecture-dependent macro get_tls for accessing this register.
The get_tls macro takes one argument, which is the register to load the
g pointer into.
For example, the sequence to load g and m
using CX looks like this:
#include "go_tls.h" #include "go_asm.h" ... get_tls(CX) MOVL g(CX), AX // Move g into AX. MOVL g_m(AX), BX // Move g.m into BX.
The get_tls macro is also defined on amd64.
Addressing modes:
-
(DI)(BX*2): The location at addressDIplusBX*2. -
64(DI)(BX*2): The location at addressDIplusBX*2plus 64.
These modes accept only 1, 2, 4, and 8 as scale factors.
When using the compiler and assembler’s
-dynlink or -shared modes,
any load or store of a fixed memory location such as a global variable
must be assumed to overwrite CX.
Therefore, to be safe for use with these modes,
assembly sources should typically avoid CX except between memory references.
64-bit Intel 386 (a.k.a. amd64)
The two architectures behave largely the same at the assembler level.
Assembly code to access the m and g
pointers on the 64-bit version is the same as on the 32-bit 386,
except it uses MOVQ rather than MOVL:
get_tls(CX) MOVQ g(CX), AX // Move g into AX. MOVQ g_m(AX), BX // Move g.m into BX.
Register BP is callee-save.
The assembler automatically inserts BP save/restore when frame size is larger than zero.
Using BP as a general purpose register is allowed,
however it can interfere with sampling-based profiling.
ARM
The registers R10 and R11
are reserved by the compiler and linker.
R10 points to the g (goroutine) structure.
Within assembler source code, this pointer must be referred to as g;
the name R10 is not recognized.
To make it easier for people and compilers to write assembly, the ARM linker
allows general addressing forms and pseudo-operations like DIV or MOD
that may not be expressible using a single hardware instruction.
It implements these forms as multiple instructions, often using the R11 register
to hold temporary values.
Hand-written assembly can use R11, but doing so requires
being sure that the linker is not also using it to implement any of the other
instructions in the function.
When defining a TEXT, specifying frame size $-4
tells the linker that this is a leaf function that does not need to save LR on entry.
The name SP always refers to the virtual stack pointer described earlier.
For the hardware register, use R13.
Condition code syntax is to append a period and the one- or two-letter code to the instruction,
as in MOVW.EQ.
Multiple codes may be appended: MOVM.IA.W.
The order of the code modifiers is irrelevant.
Addressing modes:
-
R0->16
R0>>16
R0<<16
R0@>16:
For<<, left shiftR0by 16 bits.
The other codes are->(arithmetic right shift),
>>(logical right shift), and
@>(rotate right). -
R0->R1
R0>>R1
R0<<R1
R0@>R1:
For<<, left shiftR0by the count inR1.
The other codes are->(arithmetic right shift),
>>(logical right shift), and
@>(rotate right). -
[R0,g,R12-R15]: For multi-register instructions, the set comprising
R0,g, andR12throughR15inclusive. -
(R5, R6): Destination register pair.
ARM64
R18 is the «platform register», reserved on the Apple platform.
To prevent accidental misuse, the register is named R18_PLATFORM.
R27 and R28 are reserved by the compiler and linker.
R29 is the frame pointer.
R30 is the link register.
Instruction modifiers are appended to the instruction following a period.
The only modifiers are P (postincrement) and W
(preincrement):
MOVW.P, MOVW.W
Addressing modes:
-
R0->16
R0>>16
R0<<16
R0@>16:
These are the same as on the 32-bit ARM. -
$(8<<12):
Left shift the immediate value8by12bits. -
8(R0):
Add the value ofR0and8. -
(R2)(R0):
The location atR0plusR2. -
R0.UXTB
R0.UXTB<<imm:
UXTB: extract an 8-bit value from the low-order bits ofR0and zero-extend it to the size ofR0.
R0.UXTB<<imm: left shift the result ofR0.UXTBbyimmbits.
Theimmvalue can be 0, 1, 2, 3, or 4.
The other extensions includeUXTH(16-bit),UXTW(32-bit), andUXTX(64-bit). -
R0.SXTB
R0.SXTB<<imm:
SXTB: extract an 8-bit value from the low-order bits ofR0and sign-extend it to the size ofR0.
R0.SXTB<<imm: left shift the result ofR0.SXTBbyimmbits.
Theimmvalue can be 0, 1, 2, 3, or 4.
The other extensions includeSXTH(16-bit),SXTW(32-bit), andSXTX(64-bit). -
(R5, R6): Register pair forLDAXP/LDP/LDXP/STLXP/STP/STP.
Reference: Go ARM64 Assembly Instructions Reference Manual
PPC64
This assembler is used by GOARCH values ppc64 and ppc64le.
Reference: Go PPC64 Assembly Instructions Reference Manual
IBM z/Architecture, a.k.a. s390x
The registers R10 and R11 are reserved.
The assembler uses them to hold temporary values when assembling some instructions.
R13 points to the g (goroutine) structure.
This register must be referred to as g; the name R13 is not recognized.
R15 points to the stack frame and should typically only be accessed using the
virtual registers SP and FP.
Load- and store-multiple instructions operate on a range of registers.
The range of registers is specified by a start register and an end register.
For example, LMG (R9), R5, R7 would load
R5, R6 and R7 with the 64-bit values at
0(R9), 8(R9) and 16(R9) respectively.
Storage-and-storage instructions such as MVC and XC are written
with the length as the first argument.
For example, XC $8, (R9), (R9) would clear
eight bytes at the address specified in R9.
If a vector instruction takes a length or an index as an argument then it will be the
first argument.
For example, VLEIF $1, $16, V2 will load
the value sixteen into index one of V2.
Care should be taken when using vector instructions to ensure that they are available at
runtime.
To use vector instructions a machine must have both the vector facility (bit 129 in the
facility list) and kernel support.
Without kernel support a vector instruction will have no effect (it will be equivalent
to a NOP instruction).
Addressing modes:
-
(R5)(R6*1): The location atR5plusR6.
It is a scaled mode as on the x86, but the only scale allowed is1.
MIPS, MIPS64
General purpose registers are named R0 through R31,
floating point registers are F0 through F31.
R30 is reserved to point to g.
R23 is used as a temporary register.
In a TEXT directive, the frame size $-4 for MIPS or
$-8 for MIPS64 instructs the linker not to save LR.
SP refers to the virtual stack pointer.
For the hardware register, use R29.
Addressing modes:
-
16(R1): The location atR1plus 16. -
(R1): Alias for0(R1).
The value of GOMIPS environment variable (hardfloat or
softfloat) is made available to assembly code by predefining either
GOMIPS_hardfloat or GOMIPS_softfloat.
The value of GOMIPS64 environment variable (hardfloat or
softfloat) is made available to assembly code by predefining either
GOMIPS64_hardfloat or GOMIPS64_softfloat.
Unsupported opcodes
The assemblers are designed to support the compiler so not all hardware instructions
are defined for all architectures: if the compiler doesn’t generate it, it might not be there.
If you need to use a missing instruction, there are two ways to proceed.
One is to update the assembler to support that instruction, which is straightforward
but only worthwhile if it’s likely the instruction will be used again.
Instead, for simple one-off cases, it’s possible to use the BYTE
and WORD directives
to lay down explicit data into the instruction stream within a TEXT.
Here’s how the 386 runtime defines the 64-bit atomic load function.
// uint64 atomicload64(uint64 volatile* addr); // so actually // void atomicload64(uint64 *res, uint64 volatile *addr); TEXT runtime·atomicload64(SB), NOSPLIT, $0-12 MOVL ptr+0(FP), AX TESTL $7, AX JZ 2(PC) MOVL 0, AX // crash with nil ptr deref LEAL ret_lo+4(FP), BX // MOVQ (%EAX), %MM0 BYTE $0x0f; BYTE $0x6f; BYTE $0x00 // MOVQ %MM0, 0(%EBX) BYTE $0x0f; BYTE $0x7f; BYTE $0x03 // EMMS BYTE $0x0F; BYTE $0x77 RET
https://medium.com/martinomburajr/go-tools-the-compiler-part-1-assembly-language-and-go-ffc42cbf579d

The Go compiler is at the heart of Go’s build process, taking code and generating executables from that code. Go’s compiler is available for those interested to tinker with it using the **go tool compiler**command.
Assembly and the Assembler
Assembly is programming language meant to be understood by humans, and is often characterized as a low-level programming language. In some languages, the compiler generates assembly language. In most cases Assembly is the penultimate step in the hierarchy of programming abstractions before you know how to speak to the machine.
Assembly cannot be directly executed as machine code or by the host machine, and it needs an assembler (which is just another program) to be able to convert it into machine code. Assembly differs from machine code in that, assembly does not contain binaries, it cannot be directly executed by machine code and assembly is meant to be “human readable”. Typically as you ascend the hierarchy of programming abstractions. e.g. from high-level programming languages, to low-level ones, more emphasis is placed on interfacing with the actual characteristics of the architecture you’re running on. This arguably makes assembler highly relevant when pursuing performance or accessing low-level hardware functionality such as in embedded systems.
Low Level Golang Primitives
Assembler gives access to the runtime which allows for functionality such as context switching and better access to the stack, that allows for efficient communication of data in primitives such as channels. One interesting use case is the math/big package in the Go standard library.
How Assembly is used in Go
Compiler Architecture
In a talk given by Rob Pike, he walked through some of the compilers architectural changes from early versions of the Go language, to modern day implementation. The figure shown below (Figure 1), showcases a variety steps compilers can take to transform code to linked programs.
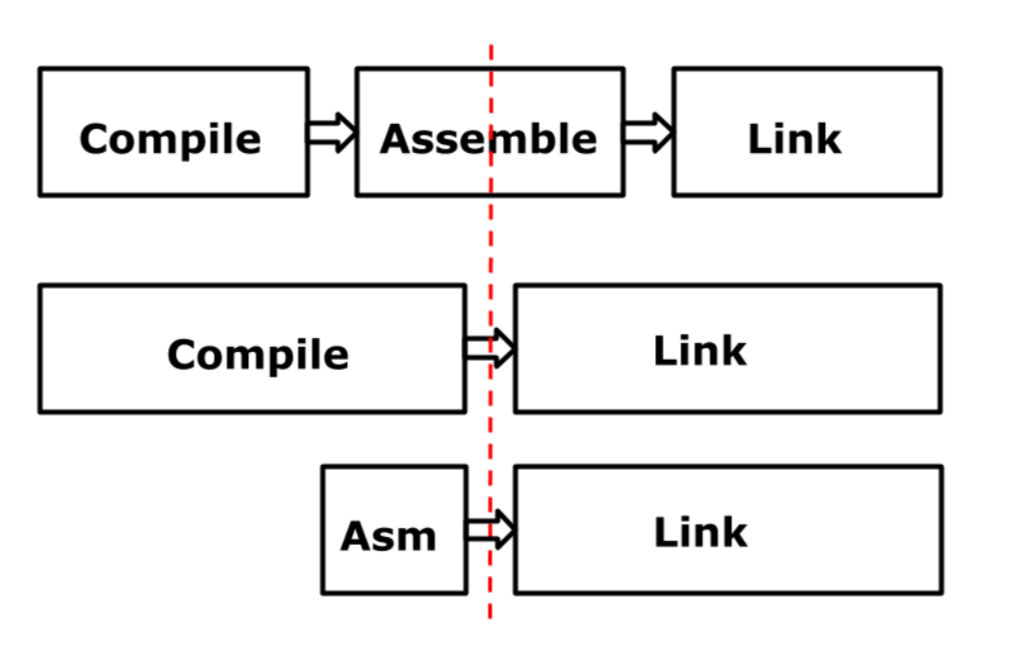
The top row, is the canonical way programs that use assembly compile code. Code is compiled into assembly, and that assembly code is then linked. gcc is an example of a compiler that does this. The red dotted line describes binary representation of pseudo instructions that are generated at that point. The subsequent rows represent how [**Plan9**](https://en.wikipedia.org/wiki/Plan_9_from_Bell_Labs) architectures go about creating executable binaries from code.
As of Go 1.3, in a bid to rid the Go standard library (STL) of C code, the Go language designers opted for a trade off that would sacrifice compile speeds, for faster builds.
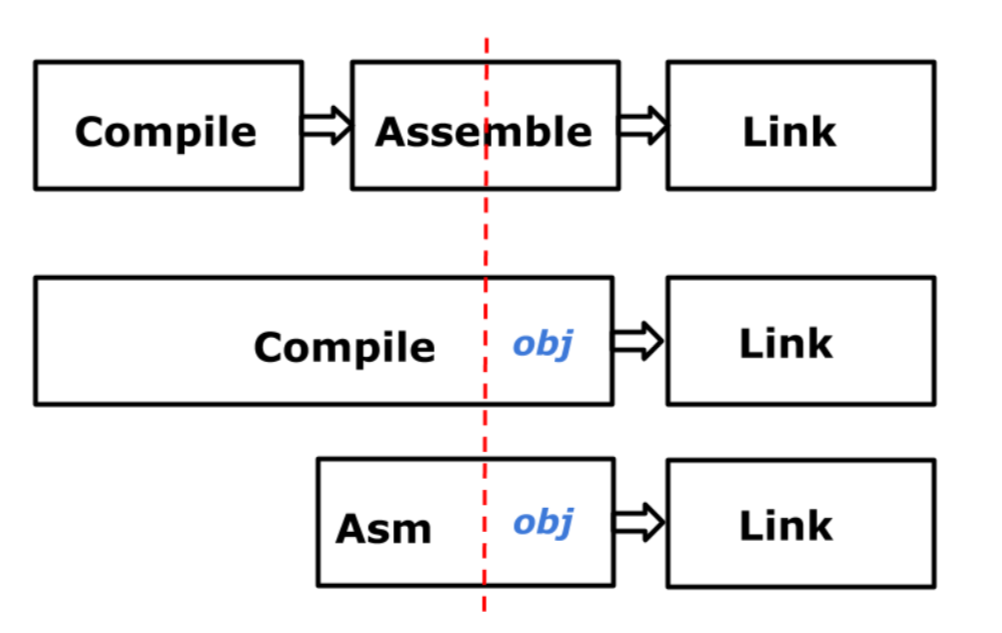
In the newer architecture, the bottom two rows (Go’s compilation process), the compiler encompasses what the traditional compiler would be doing (shown in the first row), as well as the role of the assembler. This is important, as now the compilation phase not only handles both the high-level code (golang) and the generation of assembly, it generates real instructions in the form of an intermediate representation known as **obj**. **obj** generates real instructions for the linker and is also agnostic to the type of assembler.
Where does Golang fit in all this?
Assembly is included in a small set of go packages, some of these are **runtime**, **syscall**,**math**, **crypto** and **reflect**
1. math package
The **math** and **math/big** package are one of the few packages in the standard library that actually has assembly code that your program calls into in order to achieve better performance with regards to the calculation of highly computational constructs such as big numbers i.e. numbers greater than int64 i.e 9,223,372,036,854,775,807 or less than -9,223,372,036,854,775,807.
In the words of Rob Pike, sometimes using assembler allows you to come up with something better than what the compiler could come up with on its own. math/big also has assembly functions for arithmetic operations on vectors that are more efficient to compute in assembly than in Go or C. Some trigonometrical polynomial coefficients and certain constants are referenced and computed in assembly such as pi, the computation of **arccos, arcsin, arctan** as well as other hyperbolic trignometric functions e.g. **sinh, cosh, tanh** etc.
2. crypto package
As hardware evolves and becomes more capable of computing cryptographic keys very quickly, the software needs to catch up to this. The designers of Go thought it would be better to include Assembly code for some of the **crypto**functionality (as it can be hardware dependent, especially when trying to achieve fast cryptography), and not have to include it as actual Go code in the STL. Here are some examples listed below:
- The
**crypto/aes**package contains assembly code for various CPU architectures to optimize the encryption of certain blocks. - The
**crypto/elliptic**package contains assembly code for the computation of fast prime field elliptic curves that contain 256-bit primes. - The
**crypto/md5**package has assembly for different architectures for the computation of various md5 hashes. - The
**crypto/sha256 & crypto/sha512**package uses assembly for the optimization of its SHA256 hashes.
3. reflect package
The reflect package is Go’s go to for functionality that involves the use of reflection. Reflection is best defined by this answer from StackOverflow
The ability to inspect the code in the system and see object types is not reflection, but rather Type Introspection. Reflection is then the ability to make modifications at runtime by making use of introspection. The distinction is necessary here as some languages support introspection, but do not support reflection. One such example is C++
Reflection can have the tendency to be slow, or computationally expensive. Some low-level implementations done in assembly can speed it up.
4. runtime/cgo package
The cgo tool that enables the creation of C code from Go. Some of the cross calling that happens between both languages can be optimized by the use of assembly. One technique is to efficiently reuse registers between callee and caller programs saving computation and memory usage. Some assembly optimizations also can be done for the gcc compiler. In other cases Go’s take on assembly is simply used to standardize the calling between code on all different CPU platforms.
5. runtime/atomic and sync/atomic package
Some low-level synchronization primitives are handled by Assembler. This is shown both the **runtime/atomic** and **sync/atomic** packages.
6. syscall package
It would make sense that calls to the kernel are optimized through the use of Assembly. In Linux based GOOS, the actual **Syscall** command itself is performed in Assembly. Even retrieving core OS information such as time of day, is done in assembly. Perhaps there is value in optimizing that function as a lot of tools require access to GOOS time regularly and often.
Generating Assembly in Go
With all this talk of Assembly in Go, let’s actually generate some Assembly from Go code, using the go tools. So we’ll write an extremely simple Hello World application. I’m keeping it simple because the output tends to be very verbose.
// main.gopackage main func main(){print("Hello world")}// Generates obj file as main.o// go tool compile main.go
Generates an obj file (that we speak about earlier). It is simply binary, but you can inspect it if you are curious.
// Generates assembly, and sends it to a new main.asmgo tool compile -S main.go > main.asm
See link for output
This will send the output generated by the **-S** flag into a main.asm file so you can inspect it. Note how verbose the output is, as well as all the underlying instructions.
To see the full contents of the generated files, check out this GitHub repo.
Conclusion
Assembly is important, it has been around for a long time, however as the need for performance and higher access to low-level hardware arises, it’s value is inexolerable.
If you have never seen Assembly language, here’s a code snippet from one of my 2nd Year Computer Science assignments. This code is written for MIPS architecture and checks to see if a given text is a palindrome (i.e is the same when read forward and in reverse). Note that Assembly varies based on the CPU architecture
#OMBMAR001.dataisPalinMess: .asciiz "It is a palindrome n"noPalinMess: .asciiz "It is not a palindrome n"startMess: .asciiz "Enter a number: n"temp1: .word 0 # entered numberdecima: .word 10 #decima.textmain:#START MESSAGEla $a0,startMessli $v0, 4syscall#ENTER NUMBERli $v0, 5syscallsw $v0, temp1 #SWAP NUMBER TO MEMORY################################ SETUP ########################move $v1, $v0 #move v0 to v1move $t2, $zero # set t2 = 0lw $t3, decima # set t3 = 10move $t0, $zero # set t0 = 0move $t4, $v1 # copy of int1jal reversej end#######################REVERSE: REVERSES PALINDROME#######################################reverse: #reverse the numberbgtz $t4, reverseFunction # while 0 < int1 (in $t4) do reverse stepj compare################# REVERSEFUNCTION: REVERSES THE INTEGER #########################reverseFunction:div $t4, $t3 # no/10mfhi $t6 # temp variable for mod restmult $t2, $t3 # rev * 10mflo $t2 # temp variable for mult resultadd $t2, $t2, $t6 # rev + moddiv $t4, $t3 # divide int1 copy by 10mflo $t4 # temp value for t4j reverse########### COMPARE: COMPARES THE TWO INTEGERS ########################compare:beq $t2, $v1, palj nopal############### PAL : IF PALINDROME PRINT MESSAGE #####################pal:la $a0, isPalinMess # load is palindrome messageli $v0, 4syscallj end############### IF NOT PALINDROME: PRINT MESSAGE ###############################nopal:la $a0, noPalinMess # load no palindrome messageli $v0, 4syscallj endend:li $v0,10syscall #Exit
Additional Links

- https://www.youtube.com/watch?v=KINIAgRpkDA
- [What is the Difference Between Machine Code and Assembly Language — Pediaa.Com](https://pediaa.com/what-is-the-difference-between-machine-code-and-assembly-language/
ft_authoradmin ft_create_time2020-01-24 02:47
ft_update_time2020-01-24 02:51
from: Golang windows, a complete setup guide, http://noypi-linux.blogspot.com/2014/07/golang-windows-complete-setup-guide.html
1) download ZIP
Get the latest code from: http://golang.org/dl/
2) extract ZIP
Extract zip to example C:localdevgo
3) create a gopath directory,
Gopath is where third parties will be stored. Example if you will
execute a «go get github.com/somelib», this library will be stored in
gopath. Create a c:localdevgopath
4) set the environmental variables
open System Properties->Advanced->Environmental Variables
GOROOT=C:localdevgo
GOBIN=%GOROOT%bin
GOPATH=c:localdevgopath
5) add your gobin to PATH
append C:localdevgobin to PATH
6) test
6.1) create the path «C:localdevgopathsrcmyfirstproject»
6.2) create the main.go file «C:localdevgopathsrcmyfirstprojectmain.go»
package main
import "fmt"
func main() {
fmt.Println("Hi foobar")
}
6.2) you can now build the project anywhere example,
6.2.1) open cmd.exe
6.2.2) cd c:temp
6.2.3) go build myfirstproject
6.2.4) run myfirstproject.exe
7) get a few libraries
7.1) you can download some free git, svn, and hg for windows
7.2) once you have them you can now do «go get -u github.com/somelib»
 get an IDE
get an IDE
download liteide
congrats!